
글로벌 공인 전자부품 유통기업 마우저 일렉트로닉스가 NXP 반도체의 차량관리 유닛(VMU) ‘MR-VMU-RT1176’을 공식 공급하며 모바일 로보틱스 설계 시장 공략을 강화한다. 마우저는 차세대 로보틱스와 무인 시스템을 겨냥한 고집적 올인원 컨트롤러 솔루션을 통해 설계 복잡도를 낮추고 개발 기간 단축을 지원한다는 방침이다. MR-VMU-RT1176은 모바일 로보틱스를 위한 경량 차량관리 컨트롤러로, 공장 자동화와 실시간 제어, 로보틱스, 무인항공기(UAV), 스마트 홈·빌딩, 농업 장비 등 폭넓은 산업용 애플리케이션을 지원한다. 고성능 연산과 다양한 인터페이스를 단일 플랫폼에 통합해, 복잡한 제어와 센서 처리가 요구되는 환경에 최적화된 것이 특징이다. 이 VMU에는 NXP의 크로스오버 MCU i.MX RT1176이 탑재돼 있다. 듀얼코어 1GHz Arm Cortex-M7과 400MHz Cortex-M4 프로세서를 기반으로 고속 연산과 실시간 제어를 동시에 구현한다. 여기에 다중 센서 기반 관성측정장치(IMU)를 내장해 모션 추적과 주변 환경 인식 기능을 강화했다. 통신과 확장성 측면에서도 경쟁력을 갖췄다. MR-VMU-RT1176은 2-와이어 100Base

UMR과 합작 기업 설립...드론 기술 글로벌 현지화 및 네트워크 구축 기반 마련해 드론 기술 이전·교육 체계 신설 “카자흐스탄 내 자주적 드론 생산 인프라 조성한다” 프리뉴가 카자흐스탄 소재 장비·기계 및 특수 장비 업체 ‘UMR(UNITED MACHINERY RESOURCES)’과 손잡고 글로벌 시장 공략에 박차를 가한다. 양사는 국내 드론 개발 기술과 카자흐스탄의 글로벌 네트워크 결합을 통한 해외 수출 가속화를 목표로 합작 기업 설립 파트너십을 체결했다. 해당 업무협약(MOU)은 지난 20일 경기 일산 소재 전시장 킨텍스(KINTEX)에서 열린 ‘2025 서울 국제 항공우주 및 방위산업 전시회(ADEX 2025)’ 현장에서 이뤄졌다. 이날 협약식에는 이종경 최고경영책임자(CEO), 김제중 최고운영책임자(COO), 조재환 최고재무책임자(CFO) 등 프리뉴 사단과 카자흐스탄 비상사태부·국방부 고위 관계자, 주한 카자흐스탄 공화국 특명전권대사, 아우예조프 예르잔 하비볼라예비치(Auyezov Yerzhan Khabibullayevich) UMR CEO 등이 참석해 협력을 기념했다. 프리뉴는 이번 UMR과의 협력을 통해 무인항공기(UAV) 기술의 현지화를 적극

호버플라이 테크놀로지스(Hoverfly Technologies)에 시리즈 B 투자 미국 방산 드론 공급망 핵심 강화 전략...케이알엠, 독점 핵심 부품 제조사 지정 미국 내 생산 시설 설립으로 국산화 및 공급망 안정화 도모한다 케이알엠이 미국 방위·보안용 계류형 드론 시스템 기술 업체 호버플라이 테크놀로지스(Hoverfly Technologies 이하 호버플라이)를 미국 내 방산 드론 공급망 거점을 낙점했다. 사측은 이를 위해 호버플라이에 500만 달러(약 70억 원) 규모의 시리즈 B 투자를 거행했다. 이번에 호버플라이의 신규 전략적 파트너로 합류하며 미국 시장 공략의 교두보를 마련했다. 케이알엠은 무인항공기(UAV)용 센서 및 첨단 기술을 고도화하고 있다. 이 때문에 이번 투자가 자사 경쟁력 강화와 세계 무대에서의 입지 강화를 불러올 것으로 기대하고 있다. 회사는 호버플라이를 미국 내 독점 핵심 부품 제조사이자 향후 우선 협력사로 배치했다. 앞으로 미국 내에 핵심 부품 전용 신규 생산 시설을 설립하고, 전략적 협력 관계를 통해 안정적인 고성능 부품 공급망을 구축할 예정이다. 이번 투자는 호버플라이 테크놀로지스 역사상 최대 규모의 자본 조달로 기록됐다. 호

인하대학교는 최근 베트남 CT 그룹과 미래 기술을 선도할 인재 양성과 혁신 기술 공동 개발을 위한 전략적 업무협약을 체결했다고 13일 밝혔다. 이번 업무협약에 따라 인하대와 베트남 CT 그룹은 반도체·UAV 등 첨단기술 교육의 질을 높여 실무 중심의 인재를 육성하고, 공동 연구를 진행해 기술 경쟁력을 키우는 데 힘을 모으기로 했다. 인하대와 CT 그룹은 교육생을 위해 맞춤형 교육 프로그램을 함께 개발하고 실무경험 제공, 취업 지원을 펼칠 예정이다. 자원·서비스 교류 등 여러 분야에서의 협력도 이어간다. 인하대는 이번 업무협약이 대학의 교육·연구역량 향상과 CT 그룹의 첨단기술 개발에 시너지 효과를 발휘할 것으로 기대하고 있다. 인하대 학생들은 CT 그룹에서 실무 경험을 쌓고, CT 그룹은 혁신적인 인재 교육과 첨단기술 확보를 바탕으로 지속가능한 성장을 이루는 것을 목표로 한다. 트란 킴 쭝 CT 그룹 이사회 의장은 “인하대의 뛰어난 교육 역량을 바탕으로 CT 그룹의 반도체·UAV 기술 혁신 생태계를 강화할 수 있을 것”이라며 “두 기관의 협력이 베트남과 대한민국의 인재 양성 및 기술 발전에 기여할 것으로 확신한다”고 전했다. 조명우 인하대 총장은 “이번 협약

퀀텀에어로가 2월 26일부터 28일까지 부산 벡스코에서 열리는 ‘2025 드론쇼 코리아(DSK 2025)’에 참가해 최첨단 AI 및 무인 전력 기술을 선보인다. 이번 전시에서 퀀텀에어로는 미국 쉴드 AI사의 한국 기술 독점 파트너로서 쉴드 AI사의 대표적 수직이착륙무인기 V-BAT 및 AI 기반 자율 임무 수행 알고리즘을 만드는 소프트웨어 HME(Hivemind Enterprise)를 선보인다. V-BAT은 강력한 전자전(EW) 환경에서도 작전 수행이 가능한 차세대 무인기로 지난해 대한민국 해군 독도함에서의 전투 실험을 성공적으로 마치며 그 실용성을 입증한 바 있다. V-BAT은 AI 자율비행, 정밀 타깃 추적, 강력한 GPS 재밍 대응, 위성통신을 통한 작전 반경 확대 등의 기능을 갖춘 차세대 무인기로서 더욱 강화된 기술력과 실전 운용 가능성 측면에서 독보적인 성능을 자랑한다고 회사는 강조했다. HME는 자율 비행뿐만 아니라 다중 무인 플랫폼의 네트워크 기반 협력 작전을 가능하게 하는 혁신적인 AI 솔루션으로 미래 전장의 패러다임을 변화시킬 첨단 기술로 평가받는다. HME는 UAV(무인항공기), UGV(무인지상차량), USV(무인수상정) 등 각종 무인 플랫

코난테크놀로지가 통합 AI 영상분석으로 국방 전력 강화에 나선다. 코난테크놀로지는 지난 8월 21일 해병대사령부 ‘AI 기반 공중무인체계 영상 통합분석 기술 실증 사업’ 계약을 체결했다고 10일 밝혔다. 사업기간은 계약일로부터 10개월이며 사업금액은 12억 원이다. 사업은 드론 및 UAV 등 이기종 공중무인체계를 통해 수집된 대용량 영상의 실시간 전송 및 AI 통합 분석을 지원하는 기술을 실증하고자 추진됐다. 감시 정찰의 특성상 드론 등으로 수집된 영상은 악천후와 같은 여러 변수로 인해 제한된 획득 환경에서 보다 정밀한 분석이 요구된다. 이는 AI 기반의 영상 자동 통합 분석 시스템 도입이 필수적인 이유다. 사업목표는 감시 및 정찰 능력의 향상 및 영상 분석 인력 절감이다. 실증에는 코난테크놀로지의 비디오 이해 AI 솔루션 ‘코난 와처’(Konan Watcher)가 도입된다. 이 기술은 객체인식은 물론 대용량의 데이터 관리 영역도 지원해 국방부(국방 지능형 플랫폼), 방위사업청(전국 합동화력 운용체계 성능 개량), 육군항공사령부(장비판독 AI모델 개발)등 다수의 국방 분야에 적용됐다. 김영섬 코난테크놀로지 대표이사는 “국방분야 AI기반 전력지원체계 구축 사업

KT가 글로벌 서비스에 적용 가능한 오픈 API의 개발·검증을 완료하고 세계이동통신사업자연합회(이하 GSMA)의 오픈 게이트웨이 인증 프로그램에서 국내 최초로 공식 인증을 획득했다고 7일 밝혔다. 이번에 인증을 받은 API는 Anti-Fraud API 3종을 비롯해 QoD(Quality On Demand) API 등 총 4종이다. 오픈 게이트웨이란 개방형 애플리케이션 프로그래밍 환경(API)을 표방하는 서비스형 미래 네트워크로, 서비스 개발사들과 글로벌 통신사 간의 시스템 연동이 효율적으로 이뤄질 수 있도록 각 통신사 API 규격의 표준화를 목표로 한다. 이를 통해 서비스 개발사들은 통신사마다 별도의 맞춤형 개발을 할 필요 없이 한 번의 개발로도 혁신적인 서비스를 글로벌 시장에 보급할 수 있으며 고객은 국내외 어디서나 동일한 서비스 사용 경험을 하게 된다. 글로벌 컨설팅업체 맥킨지는 오픈 게이트웨이 시장 규모가 2030년까지 약 54조원에 달할 것으로 전망하고 있다. 지금까지 23개국 45개 통신사가 오픈 게이트웨이에 참여 중이며, 이는 전 세계 고객의 66%가 활용 가능한 수준이다. 지난 2월 MWC 2024 전시에 참여한 글로벌 통신사들도 오픈 게이트웨이

루시드 비전 랩스가 최근 모듈형 Phoenix 카메라 제품군을 확장하는 새로운 Phoenix Dual Extended-Head 카메라를 출시했다. Phoenix Dual Extended-Head 카메라는 듀얼 5.0 MP 센서를 통해 동기화된 이미지를 원활하게 전송해 더 넓은 시야(FoV)를 필요로 하는 다양한 응용 분야에 적합하다. 이 카메라는 해상도 2448 x 2048 픽셀의 두 개의 Sony IMX264 글로벌 셔터 이미지 센서를 장착하여 스테레오 비전 시스템, 자율 이동 로봇(AMR), 무인 항공기(UAV) 및 지능형 교통 시스템(ITS)에 대한 확장된 시야를 제공한다. 또한, 28 x 28 mm의 가볍고 컴팩트한 디자인은 공간이 제한된 다양한 환경에 손쉽게 적용할 수 있다. 루시드 비전 랩스의 창립자 겸 사장인 Rod Barman은 “Phoenix 카메라는 스테레오 비전 구성, 다양한 시야각을 가진 드론, 또는 IR 필터가 있는 센서와 없는 센서를 모두 요구하는 지능형 교통 시스템(ITS) 응용 프로그램에 배치될 때, 듀얼 익스텐디드 헤드와 싱글 바디 디자인으로써 일관되고 신뢰할 수 있는 성능을 제공한다”라고 말했다. 덧붙여 “이 카메라는 동기화된

루시드 비전 랩스(LUCID Vision Labs)는 모듈형 Phoenix 카메라 제품군을 확장하는 새로운 Phoenix Dual Extended-Head 카메라를 출시했다고 밝혔다. Phoenix Dual Extended-Head 카메라는 듀얼 5.0 MP 센서를 통해 동기화된 이미지를 원활하게 전송해 더 넓은 시야(FoV)를 필요로 하는 다양한 응용 분야에 적합하다. 이 카메라는 해상도 2448 x 2048 픽셀의 두 개의 Sony IMX264 글로벌 셔터 이미지 센서를 장착해 스테레오 비전 시스템, 자율 이동 로봇(AMR), 무인 항공기(UAV) 및 지능형 교통 시스템(ITS)에 대한 확장된 시야를 제공한다. 또한 28 x 28 mm의 가볍고 컴팩트한 디자인은 공간이 제한된 다양한 환경에 적용할 수 있다고 회사 측은 전했다. Rod Barman 루시드 비전 랩스 창립자 겸 사장은 “Phoenix 카메라는 스테레오 비전 구성, 다양한 시야각을 가진 드론, 또는 IR 필터가 있는 센서와 없는 센서를 모두 요구하는 지능형 교통 시스템 응용 프로그램에 배치될 때 듀얼 익스텐디드 헤드와 싱글 바디 디자인으로써 일관되고 신뢰할 수 있는 성능을 제공한다”고 설명했다

파블로항공은 지난 6일 ‘모하메드 빈 자예드 국제로봇대회 2024 마리타임 그랜드챌린지 (이하 MBZIR)’에 참가한 ‘팀 KAIST’가 최종 2위를 차지하면서 상금 50만 불을 받게 됐다고 밝혔다. 올해로 3회를 맞이한 MBZIRC는 세계에서 가장 권위 있는 AI 및 로봇 경진 대회 중 하나로, 무인 해안 경비 체계 솔루션 기술의 실현 가능성을 확인하는 데 목적이 있다. 이번 대회에는 전 세계에서 52개 팀이 참가해 GNSS 불가 환경에서 이기종인 USV와 UAV 간의 협업 기술을 겨뤘다. 결승에 최종 진출한 5개 팀이 1월 11일부터 대회를 준비하고 2월 5일까지 경쟁을 펼쳤다. 이번 대회는 2022년을 시작으로 총 3단계로 진행됐다. 1단계는 군집 로봇 공학, 컴퓨터 비전, 실시간 로컬라이제이션 및 매핑, 해양 선박 및 통신에 대한 배경과 제안 기술 접근 방식 제출, 2단계는 시뮬레이션 환경에서 제안 기술 개념 검증, 3단계에서는 실제 환경에서 제안 기술을 시연했다. 팀 KAIST는 ‘위성항법 불가능한 해양환경에서 선박 및 물품을 식별하고 이동하는 로보틱스 기술’의 시연을 1차 시도 만에 성공하며 단숨에 우승 후보에 올랐다. 이어진 2, 3차 시도에서

파블로항공은 KAIST, 아비커스, 청주대학교와 함께 구성한 '팀 KAIST'가 '모하메드 빈 자예드 국제로봇대회 2024 마리타임 그랜드챌린지(MBZIRC, Mohamed Bin Zayed International Robotics Challenge 2024 Maritime Grand Challenge)' 결승에 진출했다고 25일 밝혔다. MBZIRC 2024 마리타임 그랜드 챌린지는 GNSS(Global Navigation Satellite System, 위성측위시스템) 사용 불가라는 조건에서 USV(무인수상정)과 UAV(무인항공기)의 협동을 통해 불법 조업, 해적 행위, 해상 밀수 등에 대응하는 무인 해안 경비 체계를 마련하고자 개최되는 대회다. 이번 대회는 세계 각국의 유수 대학과 기업에 소속된 52개 팀이 예선에 참여했으며, 결승에는 팀 KAIST를 비롯한 덴마크, 폴란드, 크로아티아, 중국 총 5팀이 선발됐다. 각 팀은 오는 2월에 아랍에미리트 아부다비 인근에서 열악한 GNSS 거부 환경 해양구역에서 문제 해결을 위해 자신들이 제안한 기술을 배치하고 시연할 예정이다. 파블로항공이 소속된 팀 KAIST는 이번 대회에서 '위성항법 불가능한 해양환경에서

파블로항공과 프리뉴가 국내·외 드론 산업과 기술 발전을 위해 ‘전략적 기술 개발 협력을 위한 업무 협약’을 6일 체결했다고 밝혔다. 경기 안산시 프리뉴 본사에서 진행된 협약식에는 김영준 파블로항공 대표와 이장철 사업부사장, 임승한 기술부사장, 김준영 운영이사, 유동일 기술본부장, 이종경 프리뉴 대표이사, 김제중 이사, 가충희 연구소장, 정용범 이사, 김영수 이사 등이 참석했다. 프리뉴는 차별적 기체 설계 기술과 자체 생산 체계를 통해 산업용 UAV, 핵심 항전부품, 관제 시스템 운용, 서비스용 플랫폼을 제공하고 있으며 지난해 드론 기업 최초로 산업통상자원부 소재부품기술개발사업에 선정돼 D-DMB 개발을 완료했다. 또 혁신 제품으로 프리뉴 기체와 핵심부품 개발 기술을 종합한 통합항전시스템 개발을 진행하고 있다. 양사는 이번 업무 협약을 통해 상호 보유한 핵심 기술력을 제품 및 서비스 개발에 적극적으로 활용할 수 있도록 하며, 국내·외 드론 산업과 기술 발전에 기여하기 위해 협력할 방침이다. 주요 협약 내용으로 ▲양사 드론 시스템 개발을 위한 상호 협력 ▲파블로 항공 3D 통합관제 기능에 대한 프리뉴 드로닛 플랫폼 적용 및 활용 등이다. 이종경 프리뉴 대표는 “

미국의 컨설팅 기업 ADL은 4차 산업혁명 속 새로운 물리적 이송 기술로 무인 항공기(UAV)를 꼽았다. UAV는 현대 사회에 군사, 통신, 인프라, 농업 등 다양한 분야에서 기술적 발전을 통해 활발하게 사용되고 있다. UAV에서 렌즈는 데이터 수집 및 분석의 핵심 역할을 한다. 고성능 UAV에 걸맞은 렌즈 시스템 설계는 무엇보다 중요하다. 이를 위한 정밀한 광학 시스템 설계는 필수다. UAV의 광학 시스템 설계 기술의 발전과 함께 머신비전은 더욱 새로운 분야에 활용되고 있다. 하지만 새로운 분야에 머신비전 기술을 접목하기 위해선 전통적인 머신비전 기술보다 더욱 고도화된 요구 사항을 요구한다. 새로운 영역에서 애플리케이션으로 작업할 때 이미징 시스템이 압력, 온도, 충격 및 진동 측면에서 다양한 환경 조건에 적응해야 하기 때문이다. 기존의 전통적인 머신비전 응용 프로그램으로는 해결할 수 없었던 문제를 해결하는 UAV 이미징 애플리케이션은 급속히 증가하고 있다. 드론 기술의 발전으로 인해 이미징 기술도 일관된 영상 성능을 제공하기 위해 발전해야 할 필요성이 커지고 있기 때문이다. UAV가 비행하는 높은 고도의 환경에서는 렌즈의 성능이 무엇보다 중요하다. 이번

실제와 같은 가상 환경에서 비행체 시스템 안전성 검증 모라이가 신규 UAM(도심항공모빌리티), UAV(무인항공기) 등 비행체 전용 시뮬레이션 플랫폼을 론칭하며 항공 분야로 사업 영역을 강화한다. 모라이는 9월 6일부터 9월 8일까지 미국 라스베이거스에서 개최되는 세계 최대 규모의 상용 무인항공기 전시회인 '커머셜 UAV 엑스포'에서 자사의 최신 비행체 전용 시뮬레이션 솔루션인 MORAI SIM Air를 선보인다. UAM은 늘어가는 도심 인구 증가와 교통체증 등의 문제를 해결할 수 있는 차세대 항공 모빌리티로 주목을 받고 있다. 하지만 자동차와 비교해 추락 및 사고 발생 시 큰 재산 및 인명 피해가 발행할 수 있기에 안전하고 안정적인 운영 환경 마련이 필수적이다. MORAI SIM Air는 UAM과 드론 등 차세대 항공 모빌리티를 위한 시뮬레이션 솔루션으로, 실제와 같은 가상 환경에서 비행체의 시스템 안전성을 검증한다. UAM 운영 시 도심에서 발생할 수 있는 다양한 비행 환경을 시뮬레이션으로 재현해 위험 상황을 사전에 방지하고 대비하는 등 기체의 안전성을 검증하도록 한다. 특히, 미래 도심환경에서는 더욱 정교한 교통 관리 및 제어 시스템을 필요로 한다. MO
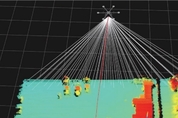
최근 Lidar(Light Detection and Ranging)를 이용한 3차원 계측은 자동운전을 위한 지도 작성, 이동 로봇의 내비게이션, 상공의 지형 계측 등 다양한 분야에서 이용되고 있다. 현재 이용되고 있는 Lidar의 대부분은 근적외 펄스 레이저를 이용해 대상물까지의 ‘거리’와 ‘방향’을 계측하는 것이다. 거리 계측은 Time of Flight (ToF) 방식에 의해 레이저를 발사한 후 대상물에 닿아 반사되어 되돌아올 때까지의 시간으로부터 산출한다. 레이저의 발사 각도는 회전형 Lidar의 경우에는 엔코더 등의 센서로 계측할 수 있기 때문에 대상물까지의 방향을 계측할 수 있다. 이것에 의해 Lidar에서 대상물까지의 상대적인 3차원 벡터를 계측할 수 있다. Lidar를 이동체에 탑재해 이동하면서 상대적인 3차원 계측을 하는 것으로, 대규모 환경의 3차원 계측이 가능해진다. 차량, 항공기, 이동 로봇 등의 여러 가지 플랫폼에 Lidar를 탑재해 환경을 계측하는 기법이 이용되고 있는데, 최근 드론, UAV(Unmanned Aerial Vehicle)에 Lidar를 탑재한 UAV-Lidar에 의한 3차원 계측이 급속히 확산되고 있다. 지금까지 UAV에
상호명(명칭) : (주)첨단 | 등록번호 : 서울,자00420 | 등록일자 : 2013년05월15일 | 제호 :헬로티(helloT) | 발행인 : 이종춘 | 편집인 : 김진희 |
본점 : 서울시 마포구 양화로 127, 3층, 지점 : 경기도 파주시 심학산로 10, 3층 | 발행일자 : 2012년 4월1일 | 청소년보호책임자 : 김유활 | 대표이사 : 이준원 | 사업자등록번호 : 118-81-03520 | 전화 : 02-3142-4151 | 팩스 : 02-338-3453 | 통신판매번호 : 제 2013-서울마포-1032호
copyright(c) HelloT all right reserved
UPDATE: 2026년 03월 18일 10시 27분

















