
양방향 직류(DC)/DC 컨버터는 자동차, 서버, 재생에너지 시스템 같은 수 많은 신종 애플리케이션들의 핵심 요소다. 저전압 양방향 DC/DC 컨버터는 비절연이 일반적이며, 현재 시중의 모든 양방향 컨버터 디자인이나 제품들은 하드-스위칭 동기식 벅 토폴로지에 기반한다. 이 논문은 오토모티브 48V/12V 양방향 컨버터를 예로 든다. 이 예를 통해 하드-스위칭 동기식 벅 토폴로지에 대해 다시 논의하고 전환-모드 토템-폴 제로-전압-스위칭(ZVS) 토폴로지와 비교한다.
디지털 컨트롤러를 이용해 하드-스위칭 컨트롤과 소프트-스위칭 컨트롤을 둘 다 구현했다. 고유의 ZVS 전환-모드 컨트롤은 복수의 위상들을 동기화하고 사이클마다 데드타임을 유지한다. 또한 우리는 효율과 EMI 등의 성능 비교를 위해 각 토폴로지마다 두 개의 110A DC/DC 컨버터를 설계, 최적화하였다. 이 결과는 양방향 DC/DC 컨버터를 설계할 때 서로 다른 비용과 효율, EMI 등의 요건들을 충족하기 위한 가이드라인이 된다.
서론

대다수 신종 애플리케이션들은 두 개 포트 사이에서 양방향으로 에너지가 이동할 수 있어야 한다. 이 글에서 언급된 저전압 양방향 DC/DC 컨버터를 이용한 두 개의 애플리케이션은 48V/12V 자동차 듀얼-버스 시스템과 서버 LES (local energy storage) 시스템이다. 이러한 시스템들은 보통 절연을 필요로 하지 않는다. 서로 다른 시스템마다 양방향 DC/DC 컨버터를 사용하는 이유와 목적은 꽤 다를 수 있다. 자동차 디자인에서 전화가 점점 늘어나면서, 스타트-스톱 자동차와 마이크로하이브리드 전기차(HEV)에 필요한 전력 수요가 크게 증가하면서 12V 파워서플라이의 3kW 한계에 육박하고 있다.
마일드 HEV는 훨씬 더 높은 파워를 요구한다. 12V 버스에 분배되는 200A 이상의 전류에는 더 큰 구리-와이어 단면이 필요한데, 이것은 시스템 비용을 증가시킨다. 고전류 분배 전도 손실 외에도, 12V 하이파워 장비는 효율은 떨어지고 출력 파워가 늘어나면 손실은 커진다. 이 문제를 해결하기 위해 48V 파워시스템을 추가하여 하이파워 컴포넌트들에 전력을 공급했다. 표 1은 BMW 마이크로-HEV 파워시스템 변경 계획을 예로 들고 있다[1].

▲ 표 1. 하이파워 로드의 배치 [1]
이 파워시스템 변경 계획은 교류발전기를 제거하고 48V 버스로 구동되는 양방향 DC/DC 컨버터를 이용해 12V 배터리를 변경한다 (그림 1).
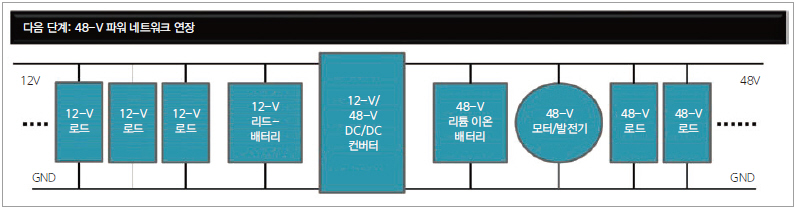
▲ 그림 1. 차량 12V 로드 및 48V 로드를 위한 듀얼-버스 파워시스템
48V 시스템은 장점이 많은데 스타트-스톱 동작의 경우, 48V에서 제동이나 감속 시 에너지 회복이 12V에 비해 두 배 효율적이다. [1], [2], [3], [4], [5]. 회복된 에너지는 차량을 가속할 수 있는 파워를 보충적으로 제공할 수 있고, 이것은 드라이빙 시스템이 엔진 성능을 잃지 않고 소형화된 엔진에서 연료 효율을 얻게 해준다. 또한 48V 시스템은 복잡함 없이 하이브리드화의 장점을 제공하면서 전반적인 연료효율을 10-15%까지 끌어올린다. 이것은 점점 엄격해지는 이산화탄소 배출 목표를 충족해야 하는 제조사에게 도움이 된다. 듀얼-버스 아키텍처의 효용은 높은 에너지 밀도 48V 콜드-크랭킹 기술이 실용화될 때까지 유지 될 것이며, 이 시점에선 제조사들이 모든 컴포넌트들을 48V로 전환할 수 있다.
서버와 데이터센터의 경우, LES는 백업-파워 풋프린트를 최소화하고 시스템 비용을 낮추면서 서비스 기능이 증진되어 설계된 새로운 파워 아키텍처이다. 처음에 마이크로소프트가 LES를 내놓았지만[6], 다른 산업들도 발 빠르게 움직였다. 집중 UPS(uninterruptable power supply)를 이용하는 대신에 LES는 더 신뢰도 높은 로컬 백업 파워를 제공한다. 그림 2는 전통적인 데이터 센터와 LES를 갖춘 새로운 데이터 센터의 차이를 보여준다.

▲ 그림 2. 기존 데이터 센터 (a); 마이크로소프트가 다시 고안한 데이터 센터 (b)
LES 디자인의 단순한 점은, 그 비용 구조 및 서비스 모델과 더불어, 데이터 센터 배치에 상당한 이점을 제공한다. LES는 기존 UPS와 관련된 손실을 최대 9%까지 제거하고 약 25%의 시설 공간을 절약한다.
또한 양방향 DC/DC 컨버터는 LES를 갖춘 서버 파워서플라이의 핵심 요소이다. 교류(AC)/DC 정류기 출력에 의해 구동될 때 양방향 DC/DC 컨버터는 정상 작동 중에 LES 배터리를 충전한다. LES 배터리는 정전 시에 백업 파워를 공급하고 AC/DC 정류기 출력 전압을 조절한다.
양방향 DC/DC 컨버터는 그 쓰임새가 많고 에너지 회복 및 파워시스템 관리에 점점 더 중요한 역할을 한다. 컨버터 디자인에서는 회로와 컨트롤의 단순성 때문에 하드-스위칭 동기식 벅 컨버터가 가장 많이 사용되는 토폴로지이다[7]. 또 다른 주요 토폴로지는 ZVS 전환-모드 동기식 벅 컨버터이다. 이 토폴로지는 ZVS 모드에서 동작하여 높은 포텐셜 효율을 가진다. [8], [9], [10], [11]. 동기식 벅 컨버터는, 사용자가 출력 전류를 역전시킬 때 부스트 모드에서 동작한다.
오토모티브 애플리케이션의 경우, 멀티페이즈 인터리빙 구조는 수냉이나 공냉의 필요성을 없애고, 컨버터의 파워 용량을 증가시키고, 넓은 공간에 걸쳐 열 소산을 배분한다. 고정-주파수 하드-스위칭 인터리브드 동기식 벅 컨버터와 달리, ZVS 전환-모드 인터리브드 벅 컨버터는 주파수-변조 모드에서 동작한다. 사용자는 그 출력 인덕터의 네거티브 전류를 제어하여 경부하에서 최대 스위칭 주파수를 제한하고 중부하에서 ZVS 동작에 필요한 에너지를 제공한다.
모든 위상은 어떤 동작 상태에서든 동기화를 유지 해야 하기 때문에 최적의 신뢰도 높은 컨트롤은 컨버터 설계자들에게 여전히 큰 복잡한 난제이다. 이 글은 두 개 토폴로지의 컨트롤 구현과 성능을 비교하는데 중점을 두고 있다. 우리는 하드-스위칭과 ZVS 컨트롤 둘 다에 UCD3138 디지털 컨트롤러를 선택하였고 4 위상 110A/12V 파워 보드를 하드-스위칭 모드와 ZVS 모드 양쪽에서 동작하게 설계하였다.
토폴로지와 컨트롤
단상 양방향 컨버터(그림 3)는 하드-스위칭 동작이나 ZVS 동작으로 벅 모드와 부스트 모드에서 동작한다. Q_top 이 액티브 스위치이고 Q_bot 이 동기식 스위치일 때, 그 컨버터는 벅 모드에서 동작한다(그림 4). Q_top과 Q_bot의 역할이 역전되면, 그 컨버터는 부스트 모드에서 동작한다(그림 5).
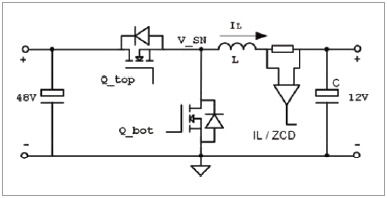
▲ 그림 3. 양방향 컨버터 파워 스테이지

▲ 그림 4. 하드-스위칭 벅 모드에서의 파형

▲ 그림 5. 하드-스위칭 부스트 모드에서의 파형
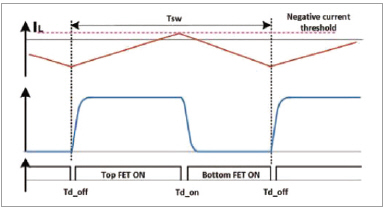
사용자는 같은 벅 컨버터를 제어하여 인덕터 전류가 네거티브가 되어 ZVS에서 동작한다. Q_top이 벅 모드에서 켜지면(그림 6), 인덕터 전류, IL이 직선으로 축적된다. Q_top이 꺼지면, IL은 스위칭 노드 V_SN을 방출한다. 데드 타임 Td_off가 충분히 길다면, 바닥 FET(field-effect transistor) Q_bot이 ZVS에서 동작한다. 과도한 데드 타임은 Q_bot 바디-다이오드 전도 손실을 증가시킨다. 따라서 V_SN이 제로까지 방출되면 Q_bot을 켠다.

▲ 그림 6. ZVS 벅 모드에서의 파형
어댑티브 데드-타임 컨트롤은 스위칭과 바디-다이오드 전도 손실을 최소화한다. 방정식 1은 데드 타임 Td_off 을 다음과 같이 계산하고 있다:

여기에서 Coss_tr은 Vds가 0과 V48 사이에서 변동할 때 MOSFET (metal-oxide semiconductor field-effect transistor)의 상당 정전용량이고, V48은 48V 버스에서의 전압이며, I_pk는 액티브 스위치 Q_top 턴오프 전류이다.
Q_bot이 켜진 후, IL은 강하하기 시작한다. 스위치는 방정식 2처럼 전류가 미리 정해진 네거티브 전류에 도달할 때까지 켜진 상태를 유지한다:

여기에서 V12는 12V 버스에서의 전압이고, Td_on은 Q_bot이 꺼질 때와 Q_top이 켜질 때 사이의 데드 타임이다.
최적화된 동작을 위해, 데드 타임 Td_on은 스위치-노드 공명 시간의 절반이어야 한다(방정식 3):

그러면 출력 인덕터에 저장된 에너지는 스위치-노드 V_SN을 V48 버스 전압까지 충분히 충전할 수 있고, Q_top은 ZVS로 켤 수 있다.
또한 그림 7처럼 부스트 모드에서 동작할 때 ZVS 동작도 가능하다. 이와 동일한 컨트롤 아이디어들은 네거티브-전류 계산과 데드-타임 컨트롤에 적용된다.
▲ 그림 7. ZVS 부스트 모드에서의 파형
CCM(continuous conduction mode)에서 동작하는 하드-스위칭 양방향 컨버터의 경우, 어댑티브 데드-타임 Td_off 컨트롤을 이용해 최적의 효율을 제공하되, Td_on은 최대한 작게 유지한다.
컨트롤 구현
UCD3138은 세 개 하드웨어 디지털 루프와 ARM7 마이크로컨트롤러로 이루어진 하이브리드 디지털 컨트롤러이다[12]. 세 개 디지털 루프는 개별적으로 또는 캐스캐이드 모드에서 동작한다. 이 컨트롤러 아키텍처는 파워 프로세싱에 필요한 정밀성과 고속을 유지하면서 탄력적인 파워관리를 이룬다.
양방향 DC/DC 컨버터는 세 개의 루프 컨트롤을 필요로 한다. 하나는 전류 루프이고, 다른 두 개는 V48 전압 루프와 V12 전압 루프이다. 이 컨트롤러의 구조와 주변장치들은 이러한 양방향 컨버터의 활용에 안성맞춤이다.
그림 8은 컨트롤러 기반 양방향 DC/DC 컨버터의 회로 블록 다이어그램이다.
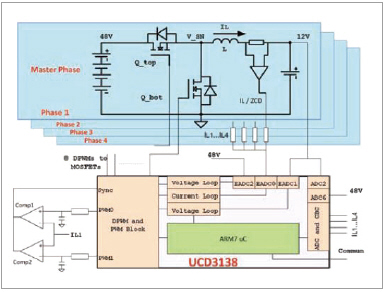
▲ 그림 8. 양방향 DC/DC 컨버터의 회로 블록 다이어그램
하나의 컨트롤러에는 8개 디지털 펄스폭 변조기(DPWM) 출력들(4 쌍)이 있는데, 이것은 네 개 위상을 동시에 제어한다. 션트 저항기는 각각의 위상 인덕터 전류를 감지하고 전류-루프 컨트롤을 위해 모든 위상 전류들을 합쳐 EADC0에 연결한다.
전압-루프 컨트롤을 위해 12V 및 48V 버스 전압들을 감지후, EADC1과 EADC2에 공급한다.
두 개의 다목적 PWM(PWM0과 PWM1)은 두 개의 프로그래머블 아날로그 네거티브-전류 레퍼런스를 생성하여 비교기 1과 2에 연결한다. 한 레퍼런스는 ZVS 벅 모드를 위한 것이고, 다른 하나는 ZVS 부스트 모드를 위한 것이다. 이 비교기들은 마스터 위상 인덕터의 네거티브 전류를 감지해 전류가 이 레퍼런스 쓰레스홀드 값에 도달하면, UCD3138의 싱크 핀에 연결된 비교기 출력은 높아진다.
동기 입력 위치에서 신호의 상승 엣지는 컨트롤러의 DPWM으로 하여금 새로운 스위칭 사이클을 다시 시작하도록 강제하고 하드웨어–기반 주파수 변조를 제공한다. 모든 슬레이브 위상들은 사이클마다 마스터 위상의 주파수를 따른다. 각각의 슬레이브 위상은 저마다 마스터 위상과 다른 딜레이 시간을 가지고 있다. ARM7은 이 딜레이 시간을 수정할 수 있어서 모든 위상들은 스위칭 주파수가 변할 때 90도 인터리빙을 유지한다. UCD3138의 한 가지 중요한 특징은 모든 데드 타임들은 스위칭-주파수 변화에 상관 없이 그대로 유지된다는 것이다. 반면 ARM7은 어느 지점에서든 데드 타임을 수정할 수 있는 권한과 유연성을 여전히 가진다.
양방향 DC/DC 컨버터는 인터리브드 구조의 전류-리플 취소의 이점을 가진다. 올바른 위상 숫자를 선택하면 전류 리플을 최소화할 수 있고 심지어 완전히 취소할 수도 있다. 구체적으로 고전압 버스가 48V이고 저전압 버스가 12V 이면, 그 전압 비율은 4대1이다. 따라서 최적의 위상 숫자는 4의 배수이다.
그림 9는 정규화된 전류 리플과 위상의 숫자를 비교한다. 이상적인 경우는 위상 숫자가 4의 배수일 때 인덕터 전류 리플이 완전히 상쇄되는 것을 볼 수 있다. 이런 이유로 4-위상 양방향 DC/DC 컨버터를 이용해 성능을 비교하였다.

▲ 그림 9. 전류 리플과 위상 숫자의 비교
디자인과 테스트
컨트롤 구성을 검증하고 토폴로지 성능을 비교하기 위해, 우리는 (12V 사이드에서) 110A 양방향 DC/DC 컨버터를 설계했다. 다른 세트의 파워 컴포넌트들을 장착하면, 이와 같은 설계는 하드-스위칭 모드에서나 ZVS 모드에서도 작동할 수 있다.
표 2는 파워-스테이지 컴포넌트의 선택과 설계를 보여주고 있고, 그림 10은 110A 양방향 DC/DC 레퍼런스 디자인을 보여준다.

▲ 표 2. 파워-스테이지 컴포넌트의 선택과 디자인

▲ 그림 10. 110A (1.6kW) 양방향 DC/DC 컨버터의 예
그림 11은 컨버터가 ZVS 벅 모드에서 동작할 때의 스위칭-노드 전압 파형과 인덕터 전류 파형을 보여준다. 스위칭-노드 파형들은 깨끗하고 부드러우며, 90도 위상으로 서로 상쇄되어 있다.

▲ 그림 11. ZVS 벅 모드에서의 스위칭-노드 전압과 인덕터-전류 파형
최대 주파수는 450kHz에 고정돼 있으며 부하가 감소하면, 스위칭 주파수가 증가한다. 스위칭 주파수가 450kHz 한계에 도달하면, 네거티브 전류가 증가하여 스위칭 주파수를 더 이상 증가하지 못하게 한다.
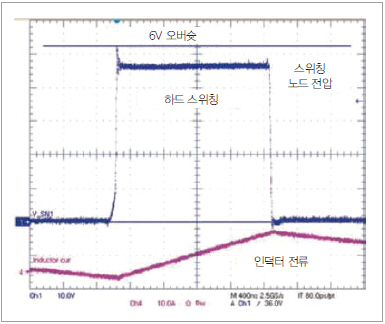
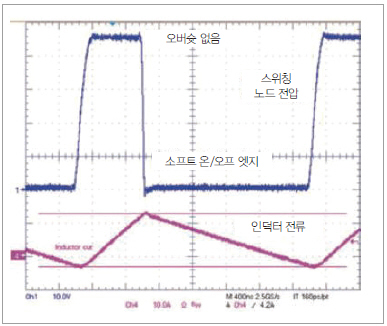
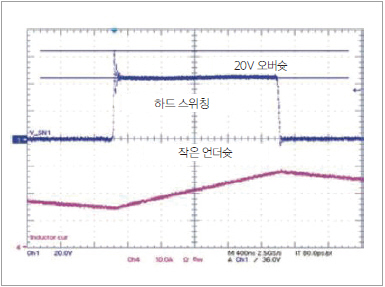
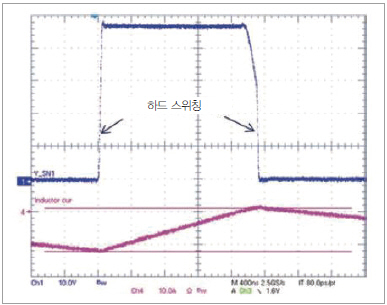
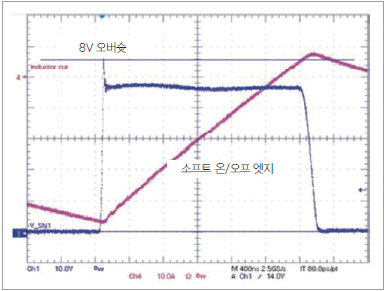
그림 12부터 그림 19까지는 하드 스위칭과 소프트 스위칭의 차이를 보여준다. ZVS 동작의 전압 상승 엣지 와 강하 엣지 파형이 더 부드럽긴 하지만, 인쇄회로기판(PCB)과 파워 MOSFET 핀 누출 인덕턴스로 인해 MOSFET이 큰 전류에서 꺼졌을 때 일부 전압이 여전히 오버슛 하는 것을 볼 수 있다. 하드-스위칭 동작은 더높은 전압 오버 슛을 가진다. PCB와 MOSFET 리드 누출 외에도 바디 다이오드의 역회복도 또한 오버슛과 울림에 기여한다.
▲ 그림 12. 20A에서의 하드-스위칭 벅
▲ 그림 13. 20A에서의 소프트-스위칭 벅
▲ 그림 14. 110A에서의 하드-스위칭 벅

▲ 그림 15. 110A에서의 소프트-스위칭 벅
▲ 그림 16. 20A에서의 하드-스위칭 부스트

▲ 그림 17. 20A에서의 소프트-스위칭 부스트

▲ 그림 18. 110A에서의 하드-스위칭 부스트
▲ 그림 19. 110A에서의 소프트-스위칭 부스트
그림 20은 컨버터의 양방향 동작을 보여준다. 12V 전류는 포지티브 값과 네거티브 값 사이에서 오르내리며 벅 모드에서 동작할 때에는 전류는 포지티브이고 12V 배터리를 충전한다. 이 전류는 부스트 모드에서 네거티브가 되고 12V 배터리의 전력은 48V까지 배터리를 충전한다.
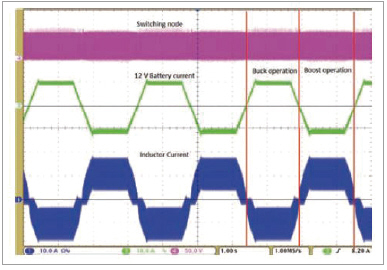
▲ 그림 20. 양방향 동작의 파형들
그래픽 유저 인터페이스 (GUI) 툴 (그림 21)은 회로 디버깅과 튜닝을 돕고 동작 모니터링을 관여한다(그림 22).

▲ 그림 21. 회로 디버깅과 튜닝을 위한 디바이스 GUI

▲ 그림 22. 양방향 DC/DC 컨버터 동작 설정과 모니터링을 위한 GUI
우리는 레퍼런스 디자인의 파워 손실을 계산했고, 그 손실들을 그림 23에서 기둥들로 표시했다. ZVS 동작을 하는 컨버터의 총 손실이 감소한 것을 볼 수 있지만, 그 감소는 크지 않다. 주된 변화는 MOSFET에서 인덕터로 파워 손실이 이동한 것으로 이러한 이동은 유리할 수 있다. 마그네틱 컴포넌트가 반도체보다 신뢰성이 더 높기 때문이다. 더 나은 마그네틱 소재이라면 ZVS 컨버터의 효율을 한층 더 향상시킬 수 있다. 그림 24와 그림 25는 이 컨버터의 효율과 부하를 비교한 그림들이다.

▲ 그림 23. 최대 부하에서 하드-스위칭 및 ZVS 벅 컨버터의 손실 분류

▲ 그림 24. 벅 모드에서의 효율과 부하 비교

▲ 그림 25. 부스트 모드에서의 효율과 부하 비교
벅 모드와 부스트 모드 양쪽에서 하드 스위칭의 경부하 효율이 더 뛰어나지만, 중부하에서는 소프트 스위칭이 더 효율적이며 소프트 스위칭은 여전히 턴오프 손실을 가진다. 스위칭 주파수가 경부하에서 증가하면, 손실이 더 커진다. 우리는 경부하 관리를 이용해 추가 테스트를 실시하였는데 여기에서 동기식 FET를 무력화하거나 이상적인 다이오드-에뮬레이션 컨트롤을 사용하면 효율이 크게 향상되는 것으로 나타났다. 이 프로젝트는 열 성능이 크게 중요한 중부하에 초점을 맞췄지만, 실제 제품 디자인에는 경부하 관리가 필요하다.
그림 26부터 그림 29까지는 최대 부하에서의 열 이미지들을 보여준다. 다운페이싱 히트싱크 온도를 안정시키기 위한 테스트 벤치 위 정전방전(ESD) 이온 발전기의 미풍을 제외하고는 강제 공냉을 하지 않았다. 이 열 이미지들을 보면, 벅 모드와 부스트 모드 모두에서 MOSFET의 소프트-스위칭 온도가 하드-스위칭 온도보다 낮고, 전반적으로 소프트-스위칭 온도는 더 균일한 것을 알 수 있다.
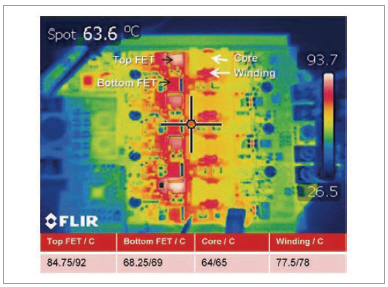
▲ 그림 26. 하드-스위칭 벅 열 이미지
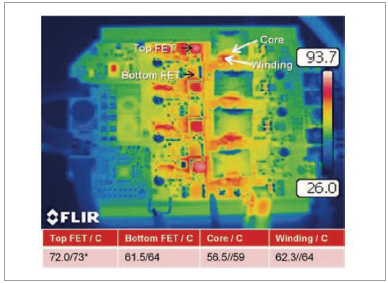
▲ 그림 27. 소프트-스위칭 벅 열 이미지
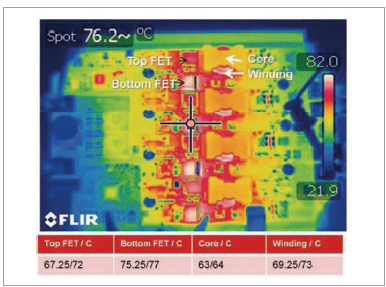
▲ 그림 28. 하드-스위칭 부스트 열 이미지
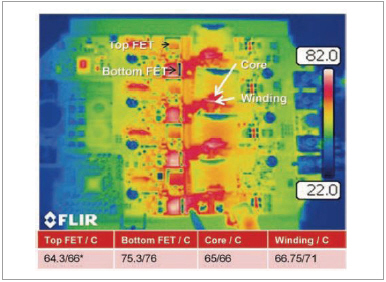
▲ 그림 29. 소프트-스위칭 부스트 열 이미지
토폴로지를 선택할 때 EMI는 항상 주된 고려사항이다. 적절한 비교와 EMI 동작에 대한 이해 도모를 위해, 우리는 하드-스위칭 컨버터와 소프트-스위칭 컨버터 둘 다에서 동일한 EMI 필터 설계를 사용했고, 최대 부하의 벅 모드에서 EMI를 스캔 했다. 그림 30의 테스트 데이터는 1MHz 미만에서는 소프트 스위칭과 하드 스위칭의 EMI 차이가 크지 않지만, 주파수가 증가하면 소프트-스위칭의 이점들이 더 크게 나타난다. 10MHz 이상에서 소프트 스위칭은 15dB 감소를 가져온다.
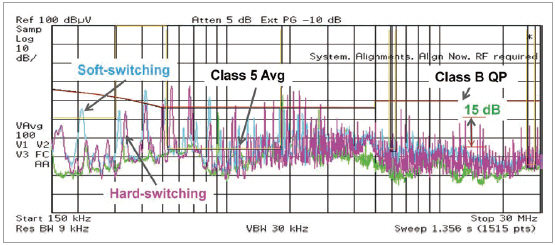
▲ 그림 30. 최대 부하의 벅 모드에서 양방향 DC/DC 컨버터에 대한 전도 EMI 테스트
요약 및 결론
우리는 두 개의 110A 양방향 DC/DC 컨버터를 설계, 최적화하여 하드 스위칭과 소프트 스위칭에서 성능을 비교했고, 회로 디버깅, 튜닝, 모니터링을 돕기 위한 GUI도 개발했다. 소프트 스위칭은 스위칭-노드 파형이 더 부드럽고 매끄러웠으며, 전압 오버슛이 더 낮았다. 경부하 관리가 없는 경우, 경부하에서 하드 스위칭이 소프트 스위칭보다 더 효율적이지만, 중부하에서는 소프트 스위칭이 더 효율이 높다.
중부하에서 소프트 스위칭의 효율 우위는 큰 피크 전류와 높은 턴오프 손실 때문에 그리 크지 않지만, 실리콘에서 마그네틱 부품으로의 손실 이동으로 MOSFET 온도는 낮아지고 파워 보드에서의 열 분배는 훨씬 더 균일해진다.
경부하 관리는 소프트-스위칭과 하드-스위칭 둘 다의 경부하 효율을 향상시킬 수 있다. 소프트-스위칭은 1MHz 미만에서는 전도된 EMI 방출이 낮아지지 않지만, 주파수가 증가하면 그 이점이 더 커지게 되어 10MHz 이상에서는 15-dB EMI 감소에 도달하게 된다.
소프트 스위칭의 작동이 전체적으로 더 나은 편이지만, 그 디자인과 컨트롤은 더 까다롭다. 디자인을 위한 토폴로지 선택은 구체적인 요건들과 시간, 가용 자원에 좌우된다.
UCD3138은 하드-스위칭과 소프트-스위칭 양방향 DC/DC 컨버터 디자인 둘 다에 안성맞춤이다. 그 하이브리드 아키텍처는 정밀하고 빠른 하드웨어 파워-프로세싱 컨트롤과 탄력적인 소프트웨어 파워 관리가 가능하다. 이 컨트롤러의 하드웨어는 멀티페이즈 ZVS 주파수 변조를 지원할 수 있고 일정한 데드 타임을 유지할 수 있다.

종 예 (Zhong Ye) 시스템 엔지니어 / 사나탄 라자고팔란(Sanatan Rajagopalan) 펌웨어 엔지니어
▶▶ 텍사스 인스트루먼트