TOF(Time of Flight)는 신호(근적외선, 초음파, 레이저 등)를 이용하여 어떤 사물의 거리를 측정하는 기술이다. 어떤 곳에서는 레이저로 TOF 기술을 이용하여 질량분석기를 구현하기도 한다. TOF 센서를 이용한 깊이 정보를 추출하기 위해 TOF 거리 연산의 기본원리를 알아본다.
1. TOF의 개념
TOF(Time of Flight)는 신호(근적외선, 초음파, 레이저 등)를 이용하여 어떤 사물의 거리를 측정하는 기술이다. 2015년 현재 최신 3D 카메라에 적용되지만 점차 그 응용범위를 넓혀가고 있다. 어떤 곳에서는 레이저로 TOF 기술을 이용하여 질량분석기를 구현하기도 한다. 'Time of Flight' 기술이란 신호가 날아가서 어떤 물체에 부딪친 후 다시 돌아오는 시간(비행 시간)을 측정하여 사물의 깊이(depth)를 측정하는 것이다.
2. TOF 거리 연산의 기본원리

TOF 센서를 이용한 깊이 정보를 추출하기 위한 기본원리를 알아본다. TOF 기술은 송신부에서 신호를 발사하고, 수신부에서 신호를 측정하는데 신호의 비행시간을 측정하므로 TOF 센서는 송신부와 수신부를 한 장치에서 약간 떨어뜨려 구현한다. 그리고 송신부에서 반사된 신호가 수신부에 영향을 미칠 수 있으므로 송신부와 수신부 사이에 차단막을 설치하기도 한다.
센서 시스템의 송신부에서는 특정 주파수(f)의 신호로 변조된 빛을 보내고, 수신부에서는 물체에 반사되어 되돌아오는 빛을 감지한다. 여기서 신호는 펄스파 또는 연속파(CW, continuous-wave)로 변조된 것이다. 신호(빛)이 물체까지 왕복하는 시간에 의한 위상 변화를 감지하여 식 (1)과 같이 센서와 물체 사이의 거리를 계산할 수 있다.[1]
 -------------------------------- (1)
-------------------------------- (1)
여기서 d는 측정거리, c는 빛의 속도, f는 변조된 신호의 주파수, n은 위상 주기가 반복되면서 생기는 상수, θ는 수신된 빛의 위상을 뜻한다.
그런데 d의 최대 거리가 명백하게 정해져 있을 때 n은 0(zero)으로 가정한다. 그러면 간단한 계산으로 식 (2)로 나타낼 수 있고, 이 때 변조 주파수 와 최대 측정거리 와의 관계는 식 (3)과 같다.
 ------------- (2)
------------- (2)
 ------------- (3)
------------- (3)
TOF 센서를 이용하여 반사된 빛을 수신할 때 아날로그 신호를 디지털 신호로 변환하기 위하여 샘플링(Sampling)을 해야 되는데 변조된 신호의 주파수와 동일한 주파수로 하는 경우를 Homodyne 방식[2]이라 하고, 다른 주파수로 샘플링 하는 경우를 Heterodyne 방식[3]이라고 한다.
그리고 시간 간격을 두어 여러 번의 샘플링을 한다. 왜냐하면 신호를 한번만 샘플링하면 위상이동, 물체의 색이나 표면 특성으로 인한 반사율, 배경 등의 여러 가지 이유로 인해 빛의 강도를 구분할 수 없기 때문이다.
신호의 위상(θ)에 따라 대상물의 깊이 정보가 틀려지므로 반드시 반사된 빛의 위상 변화를 알아야 한다. 따라서 Jongenelen의 연구[1]를 참고하면, TOF 센서에서는 픽셀 강도(pixel intensity) 데이터가 들어오는데 이를 이용하여 위상 변화에 대한 사인(sine)과 코사인(cosine) 데이터를 얻을 수 있다.
이 두 가지 데이터를 아크탄젠트(arctangent) 연산을 통해 위상을 계산할 수 있고, 그 후에는 간단한 연산을 통해 원하는 깊이 정보를 얻을 수 있다[4].
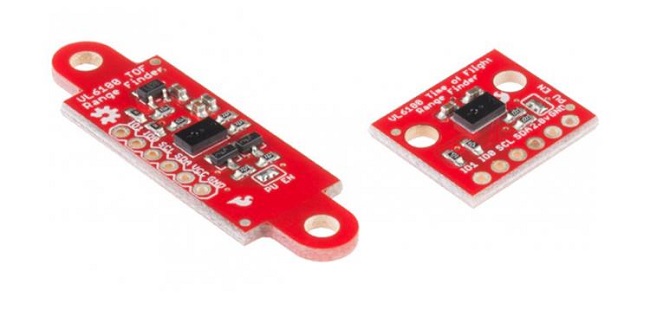
<그림 1> VL6180 TOF 센서
3. TOF 관련 특허
TOF는 최신 기술이어서 국가별, 연도별 특허 동향을 파악하면 개발 방향, 기획 및 기술정책 수립에 도움을 받을 수 있다. 본 특허동향에서 검색 DB는 Wisdomain이고 검색대상DB는 다음과 같다.
검색식은 다음과 같다.
(ir or infrared* or 적외선*) and (tof* or time-of-flight* or "time of flight*") and (센서 or sensor* or 무선 or wireless* or 통신 or telecommunication*) and (영상 or imag* or picture* or 카메라* or camera* or irradiation* or 광학 or optical* or 얼굴 or fac* or 디스플* or display*) and (3d or dimension* or three-dimension* or "three dimension*" or 3-dimension* or "3 dimension*" or 3dimension* or depth* or 거리 or distance* or space* or 근접 or proximity*)
이 검색식으로 206건의 TOF 관련 공개, 등록된 특허들이 조사되었는데 TOF 관련 특허들과 내용상 차이가 있는 30건을 제외한 176건을 대상으로 하였다.
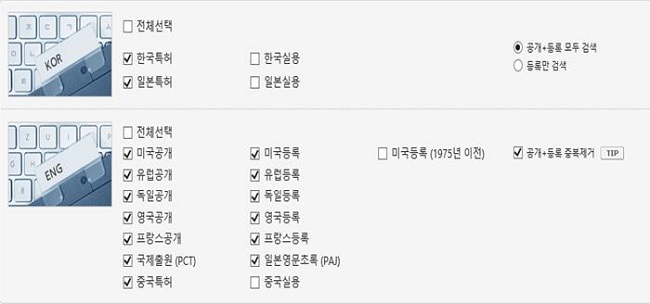
<그림2> Wisdomain DB의 국가 선택
4. TOF 기술의 특허 동향 분석
TOF 기술에 대해 전체 국가들의 출원 동향을 차트로 그려보면 다음과 같다. 이 특허 분석에 의하면 TOF 기술이 2009년부터 출원이 급증하고 있음을 알 수 있다.
출원인 국가별 동향을 알아본다. 출원인 국가 동향의 DB 건수는 전체 176건에서 출원인 국가가 나와 있지 않은 23건의 특허들을 제외한 153건을 조사, 분석 대상으로 하였다.
국가별 특허출원에서 미국(US)이 압도적으로 1위를 차지하고 있으며, 한국과 벨기에(BE), 일본(JP)이 그 뒤를 잇고 있다. 출원인의 국적별 출원건수에서 미국인이 압도적으로 많은 것은 미국이 관련기술개발을 주도하고 있다고 판단된다.
전 세계적으로 TOF 특허를 3건 이상 출원한 회사들을 살펴보면 다음의 <표 1>과 같이 조사된다. <표 1>에서 삼성전자가 가장 많은 특허 출원을 하고 있다. 그리고 Software를 주업무로 하는 Microsoft 미래를 대비하여 삼성전자 다음으로 많은 특허 출원을 하고 있음을 알 수 있다.
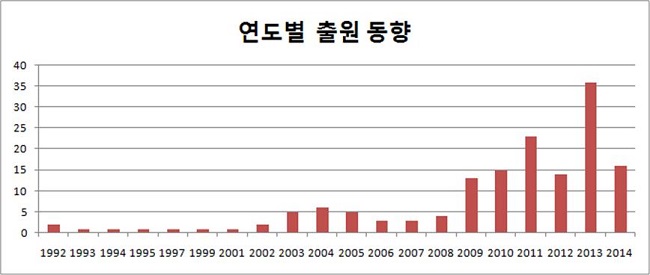
<그림3> TOF 기술의 연도별 출원 동향
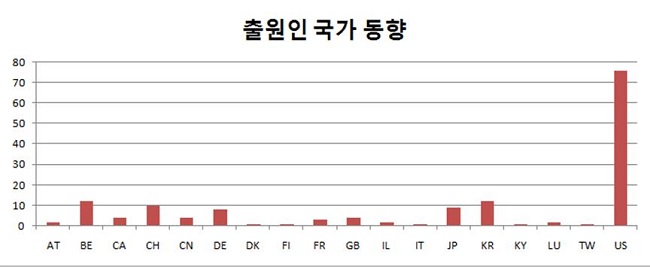
<그림4> 출원인 국가별 동향
5. 특허평가 등급
조사된 TOF 특허에서 특허평가를 통한 등급을 살펴본다. 등급은 Wisdomain에서 제공하는 평가등급을 참조하였다. 특허평가 등급은 전체 176건에서 57건의 특허들이 등급 표시가 되어 있으며 나머지는 표시되어 있지 않다. 조사된 특허평가 등급은 다음의 <표 2>와 같다.
<표 2>를 살펴보면 조사된 특허평가에서 B0 이하가 36건으로서 전체 57건의 50% 이상을 차지하고 있다. 또한 등급도 나와 있지 않은 특허들이 119건임을 볼 때 TOF 기술이 기술 cycle 단계에서 진입단계에 있음에도 아직은 특허의 질이 전체적으로 높지 않음을 알 수 있다.
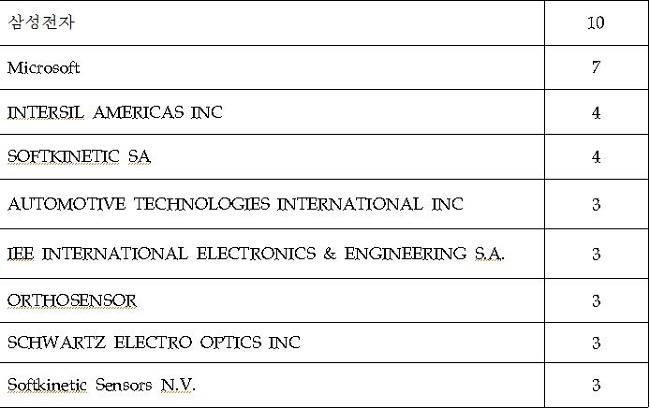
<표1> TOF 기술 특허 출원 상위 회사

<표2 > TOF 특허평가 등급
[참 고 문 헌]
[1] Jongenelen, A.P.P., “Development of a Compact, Configurable, Real-time Range Imaging System,” Ph.D dissertation. School of Eng. Victoria University of Wellington, 2010.
[2] Jongenelen, A.P.P., Bailey, D.G., Payne, A.D., Carnegie, D.A., Dorrington, A.A., "Efficient FPGA Implementati on on Homodyne-Based Time-of-Flight Range Imaging," Journal of Real-Time Image Processing, Special Issue, 2010.
[3] Jongenelen, A.P.P., Carnegie, D.A., Dorrington, A.A., Payne, A.D., "Heterodyne Range Imaging in Real-time," Proceedings of International Conference on Sensing Technology, Tainan, pp. 57–ェ62, 2008.
[4] 구정윤 · 신경욱, “TOF 센서용 3차원 Depth Image 추출을 위한 고속 위상 연산기 설계”, 금오광과대학교, 2012.12.
윤덕하 객원전문기자