




유무선 혼합 제어 통신망 연구사례
공장 자동화 시스템에서 제어기와 센서/구동기를 연결시키는 제어용 유/무선네트워크는 중요한 요소이다. 이들 장치는 유기적으로 동작해야 하므로 장치 간의 통신과 제어를 위한 네트워크 기반 실시간 제어 시스템이 필요하게 된다.
산업용 제어 통신망에 무선 기술을 적용하기 위해 가장 일반적인 방법으로 유무선 게이트웨이를 사용할 수 있다. 유무선 게이트웨이는 매체접근 방식에 따른 통신 우선순위와 최대지연 요소를 고려해 양측 네트워크의 메시지 전송과 노드 제어 역할을 수행해야 한다. 이종의 유무선 네트워크가 공존하게 되면 이를 구현하고 활용하기 위한 정확한 동기화가 어렵다. 그러므로 유무선 네트워크 간의 동기화 메시지 전송과 제어를 위해서 유무선 게이트웨이 내부적 알고리즘을 통해 네트워크 간의 시간 동기화를 고려해야 한다.
이 글에서는 실시간이 요구되는 산업용 환경에서 유/무 양측의 네트워크를 통해 전달되는 메시지에 대해 중간 제어 계층인 게이트웨이 내부에서 실시간적인 동기화를 보장하는 3단계의 순차적 알고리즘을 살펴보고 사용 가능성들을 알아보고자 한다.
유무선 공유 네트워크 환경
실시간 유/무 혼합 네트워크는 그림 1과 같이 네트워크 A는 유선으로 구성되며, 네트워크 B는 무선으로 구성된다. 중간 계층의 역할인 게이트웨이는 네트워크 A와 B의 마스터 역할을 하게 되며, 센싱 데이터를 얻거나 제어를 위한 데이터를 전송한다.
네트워크 A의 특정 메시지는 네트워크 B의 구성 노드들에 양 방향 영향을 줄 수 있다. 네트워크 A의 경우 네트워크 B보다 상대적으로 매체 접속을 위한 시간이 적고, 전송 속도도 빠르다. 그러므로 A에서 B로의 메시지와 제어신호 전파는 네트워크 B의 채널 상황에 의해 제한된다.
유선 네트워크에서의 각 노드 동기화와 채널 접근 지연은 무선 네트워크보다 적다. 그러므로 무선 네트워크의 채널 접속 지연과 각 노드의 동기 오차를 위한 보정 알고리즘과 지연으로 인한 응답 시간의 증가 등이 중요한 문제가 될 수 있다.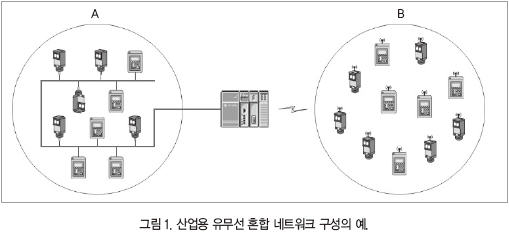
예를 들어 유무선 하이브리드 모듈은 그림 2에서 나타낸 것처럼 유선 I/O 슬레이브와 무선 게이트웨이 및 무선 슬레이브 등이 포함된 디바이스넷 모듈과 무선 모듈로 구성될 수 있다. 디바이스넷 기반의 프로토콜이 아니더라도 다른 유/무선 필드버스의 경우 이와 유사한 구성이 될 수 있다.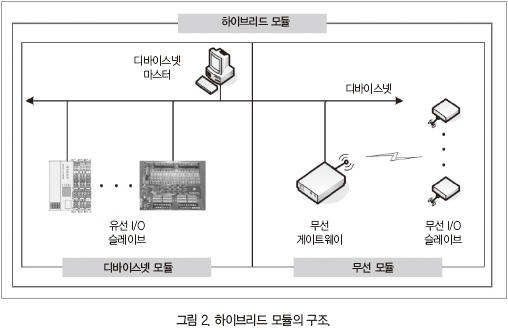
유무선 하이브리드 네트워크의 성능 분석을 위해, 기존의 마스터/슬레이브 서비스 중 폴링/COS 서비스의 경우와 무선 I/O 슬레이브의 상태 변화로 인한 메시지 발생에서 메시지 응답 ACK까지의 전송 시간을 그림 3과 같이 나타낼 수 있다.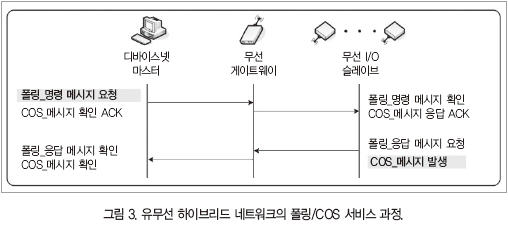
유무선 혼합형 무선망 구현을 위한 알고리즘
유무선 혼합형 네트워크에서 문제는 게이트웨이 사용으로 인한 동기화 문제와 이와 관련된 채널지연과 주파수 지연이 있을 수 있다. 일반적으로 유선 필드버스의 대표적인 예인 CAN에서는 NTP(Network Time Protocol)를 이용하여 동기화로 문제들을 해결한다.
ISA 100.11a와 Wireless HART IEEE 802.15.4 기반의 무선 제어망은 저전력을 위해 노드 트랜시버의 전력을 송수신에만 사용하기 때문에 전송 간격이 큰 비주기 노드의 경우에는 동기화가 어렵다. 그래서 각 표준들은 나름의 보완책들을 제시하고 있다.
산업용 무선 센서네트워크에 적용되는 동기화 알고리즘들은 내부적 클럭 보정 방식과 이벤트 순서화 방식, 클럭 참조 방식으로 나뉘며, 각각 장단점들은 아래와 같다.
TPSN(Timing-sync Protocol for Sensor Networks)은 각 노드의 레벨 설정으로 순차적 동기화를 수행하는 구조를 가진다. 유무선 공유 네트워크의 경우 게이트웨이와 유선과 무선 양측의 계층만을 가지므로 TPSN의 레벨 설정 방식은 비효율적이다.
이것을 개선한 TSync(Time Synchronization service)는 마스터 노드에서 하위 노드와의 타임스탬프 계산으로 클럭 오차 값을 브로드 캐스팅하여 각 노드가 동기화를 수행하는 알고리즘이다.
구조적으로 유무선 공유 네트워크에 적용 가능한 알고리즘이지만 무선필드버스에 사용되는 IEEE 802.15.4의 경우 오차 값의 브로드 캐스팅을 위해 타 노드와 경쟁이 필요하고, 긴 시간 동안 채널을 이용하지 않는 노드는 동기화가 어렵다.
Global Sync(Global Clock Synchronization)는 클러스터 구조에 적합한 동기화 알고리즘으로 유무선 공유 네트워크처럼 연결장치의 지연이 큰 환경에서 적용하기 어렵다.
FTSP(Flooding Time Synchronization Protocol)는 기준 시간을 플러딩 기법을 통해 망에 알려 동기화 하는 방식으로 유선 단독 또는 유무선 공유 네트워크에서는 비효율적이다.
이벤트 순서화 방식의 예로는 이벤트나 메시지의 순서 및 시간적 관계를 유추해내는 TS-adhoc(Time Synchronization in ad hoc networks) 알고리즘이 있다. 이는 마스터 노드를 이용해 상대적인 시간차만을 이용하는 알고리즘이다. 유무선 공유 네트워크의 경우 각각의 노드가 서로 참조되어 센싱/구동되어야 하므로 적합하지 않다.
클럭 참조 방식은 시간 동기화를 위해 각 노드의 시간 정보를 이용해 개별 노드에서 시간 차이를 계산하고 유지하는 알고리즘이다. RBS가 대표적이며, 이를 변형한 Tiny/ mini-sync와 LTS, Adaptive sync가 있다. LTS(Light weight Time Synch ronization)는 높은 에너지 효율을 위한 알고리즘이다.
공장 환경에 적용될 유무선 공유 게이트웨이의 경우 한정된 공간에서의 네트워크를 유지하므로 에너지 효율보다는 시간적인 정확성이 요구된다. Tiny/ mini-sync는 센서 노드에 효율적인 동기화 알고리즘으로 LTS와 마찬가지로 공장 환경에서의 요구되는 노드 특성과 차이가 있다.
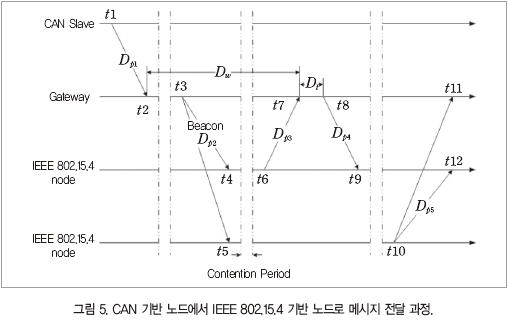
위에 설명된 알고리즘들을 이용해 아래 그림 4와 5와 같이 CAN 망과 IEEE 802.15.4 기반의 무선 제어망을 연결했다고 가정 해보자. 그림 4는 CAN 노드에서 IEEE 802.15.4 노드로 메시지 전달과정을 보여준다. IEEE 802.15.4는 조정자 노드가 메시지를 전송하기 위해 메시지 수신 요청을 하는 절차를 가진다. 그림 3의 시간 t2는게이트웨이에 도착한 CAN의 메시지를 다음 비콘 전송까지 버퍼에 대기 상태가 된다. 그리고 비콘 전송에서 메시지의 크기와 도착 주소를 전송 주소 영역에 기록하여 해당 노드로 전송한다.
비콘을 받은 노드가 CFP(Contention Free Period) 노드일 경우 자신의 GTS 슬롯에서 전송요청을 한다. CAP 노드의 경우 경쟁구간에 참여하여 채널을 선점하고, 전송을 요청한다. 게이트웨이 내부에서 총 지연 Da후 시간 t7에서 전송 요청을 받고, 트랜시버의 지연 D후 시간 t8에 전송한다.
그림 4와 5에서 시간 동기화와 양방향 간의 채널 전송지연을 해결할 수 있지만 각 노드들의 주파수 지연 요소를 제거하기는 어렵다. 주파수 지연은 각 노드에서 동일한 진동소자로 구동되더라도 시간, 온도, 압력 등의 요소에 따라 오차가 발생하여 기준 시에 대해 서로 지연이 발생한다. 이는 전송지연과는 독립적이며 노드 자체적으로 주파수 지연을 보정하는 알고리즘이 필요하다. 노드 내부의 주파수 지연이 누적되면, 센싱/구동을 위한 메시지들은 시간 오차가 발생하고 이는 주파수 오차가 된다. 누적된 주파수 오차는 노드의 전송시간에 영향을 주어 각 노드들이 하나의 채널을 공유할 경우 채널 효율을 감소시킨다.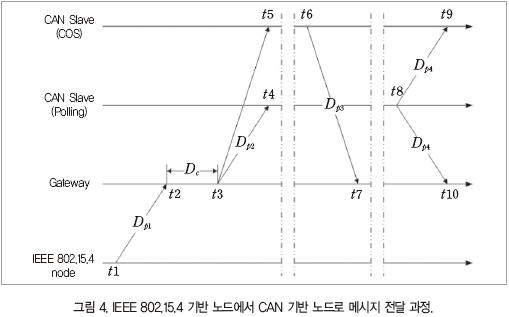
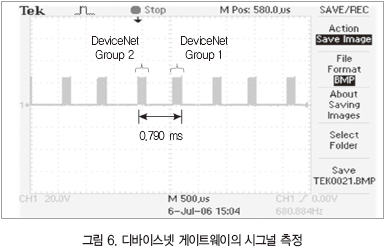
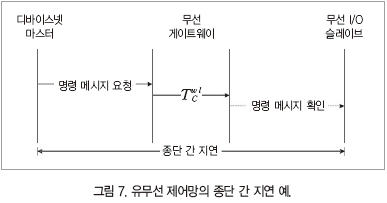
산업용 블루투스 디바이스넷 게이트웨이를 이용한 유무선 하이브리드 네트워크의 데이터 전송 시간을 오실로스코프와 연동된 프로그램을 이용해 살펴보면 그림 6과 같이 나타난다. 그림 7은 그림 6에 나타난 종단 간 시간의 전체 흐름도를 보여준다.
김동성 금오공과대학교 전자공학부 교수(dskim@kumoh.ac.kr)








































