

서비스로봇 표준화, 로봇 산업 빅뱅 이끌 것
로봇 모듈은 로봇 시스템을 구성하는 요소 중에서 기능적으로 독립적인 모듈로 디자인되어서 일반성과 표준화에 따라 교체가 가능한 부분이다. 이 모듈은 크게 기계적·전기적 모듈인 하드웨어 모듈과 소프트웨어 모듈로 나뉠 수 있다.
로봇은 기능상 같거나 유사함에 따라 크게 이동 모듈, 인식 모듈, 조작 모듈로 나눌 수 있으며, 각 모듈은 다른 작은 모듈인 구동모듈, 제어모듈, 센서모듈 등으로 나눌 수 있다.
하드웨어 모듈 간 연결은 신호선, 통신선 등의 전기적 연결과 기구물 등의 기계적 연결로 나눈다. 소프트웨어 모듈은 센서 제어 모듈, 모터 제어 모듈, 위치 확인 모듈, 얼굴인식 모듈과 같이 하드웨어 모듈을 활용하여 원하는 기능을 얻게 하는 소프트웨어로 구성되어 있다.
따라서 서비스로봇의 모듈화란 조인트, 링크, 센서, 배터리와 같은 하드웨어 부품들과 소프트웨어 모듈들을 로봇이 특정 서비스를 수행하는 데 필요한 요구사항을 충족하도록 모듈들의 조합이 유연성 있게 서비스로봇의 구성물들을 그림 1과 그림 2와 같은 모듈들을 나누는 것을 말한다.
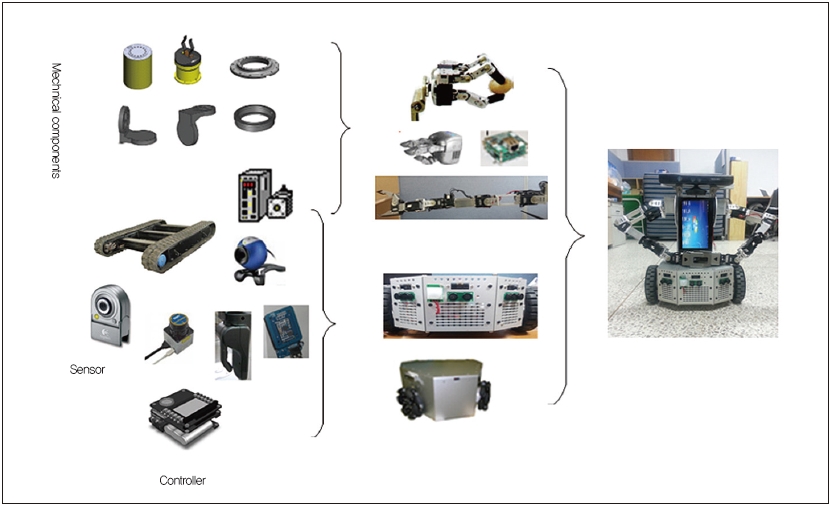
그림 1. 기계적·전기적 모듈 구성된 로봇 예
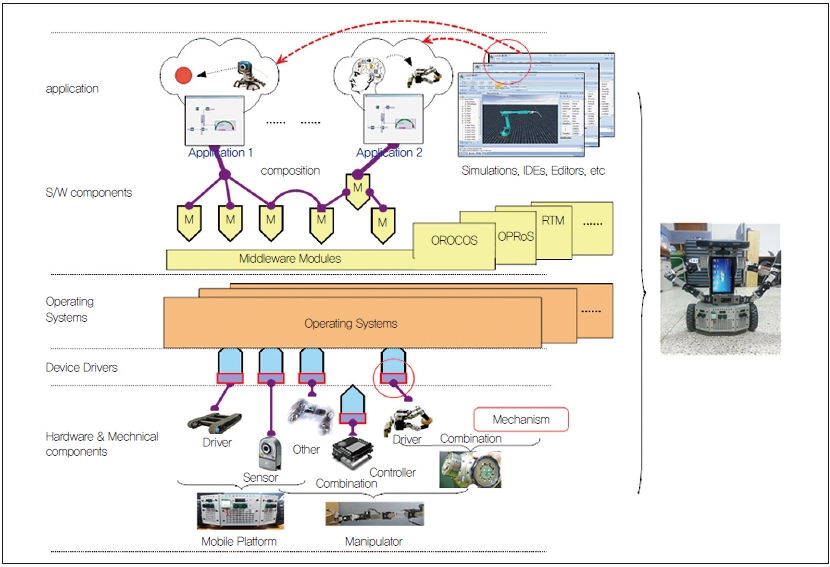
그림 2. 운영체제(OS)를 포함한 소프트웨어 모듈 관점에서 본 로봇 예
그림 1은 기계적·전기적 모듈만 표시되어 있다.
기계적·전기적 단위 모듈들이 모여 서브 모듈들로 구성하고 이러한 모듈들이 모여 로봇이 되는 과정을 도식적으로 보여주고 있다. 그림 2는 소프트웨어 모듈과 기계적·전기적 모듈 간의 연관성을 보여주고 있다. 기계적·전기적 모듈 간의 연관성은 전기적 모듈 간의 인터페이스와 기구물(mechanical part) 모듈 간의 인터페이스로 나눌 수 있으며, 소프트웨어 모듈 간의 연관성은 소프트웨어 모듈과 운영체제 및 미들웨어 간 인터페이스, 소프트웨어 모듈 간 인터페이스, 소프트웨어 모듈과 개발도구와의 인터페이스들로 나눌 수 있다.
특히 기구물 관점에서는 로봇의 크기와 무게에 따라 연결하는 방법이 다르기 때문에 힘들 수 있고, 전기적 인터페이스는 현재에도 너무 많은 국제 표준이 제공되고 있다는 것도 문제이다. 또한, 소프트웨어 인터페이스 관점에서도 너무 기능적으로 세분화하여 사용하고 있는 것도 문제이다. 이러한 문제들에 대한 해결책은 로봇 업체의 매출과 연계되어 있기 때문에 현재까지 서비스로봇에 대한 모듈 표준화를 하지 않는 원인이 될 수 있다.
서비스로봇의 모듈화 표준 필요성
서비스로봇은 인간의 요구사항을 충족하는 서비스를 제공하는 로봇을 말한다. 서비스로봇은 알지 못하는 환경에서 자동주행이 가능할 것이 요구되고, 스마트하게 생각하며, 결정하는 능력 및 시각적 청각적 능력과 사람에게 친절한 방식으로 응대할 능력도 요구된다. 서비스로봇은 복잡하고 변화하는 환경에 적응할 수 있고, 미지의 환경에서도 자동적으로 판단하여 다양한 복잡한 기능과 태스크를 완수해야 한다. 즉, 서비스로봇이 수행하는 환경에 따라 다양하게 기능을 요구하게 된다.
2007년 1월 Scientific American magazine에서 마이크로소프트의 빌게이츠는 미래에는 모든 가정에 로봇(“robot in every home”)을 볼 수 있을 것이라고 했다. 현대생활의 속도는 점점 빨라지고 있고, 사람들은 일상의 집안일로부터 벗어나고자 한다. 또한, 노령화에 따라 돌봄이 필요한 노인들이 늘어나고 있다. 사회적 보안과 서비스의 필요성은 더욱 증가하고 있다. 서비스로봇은 사람들이 하고 있는 힘들고 위험한 일들을 부분적이든 전일적이든 수행하는 것이 추세가 되어감으로써 이러한 작업에서 사람들이 자유로워질 수 있다.
IFR이 매년 발간하는 World Robotics의 2012년 보고서를 보면, 2012년~2015년의 가사일을 위한 여러 종류의 로봇 매출은 1,100만대에 이르러서 48억 달러에 이를 것이라고 예측했고, 엔터테인먼트용, 레저용 로봇은 470만대에 이르러 11억 달러의 매출을 예측했다. 이 서비스로봇 시장은 앞으로 20년간 증가할 것임을 추산하고 있다.
현재 다양한 로봇 제조사들은 하드웨어 혹은 소프트웨어 모듈 수준에서 자사가 개발한 모듈들을 타 회사의 모듈로 교체하거나 연결할 수 없고 연동도 어렵다. 즉, 거의 모든 로봇 회사들이 같은 종류의 하드웨어 모듈과 소프트웨어와 응용을 개발하는 등 기술적 및 경제적 낭비를 가져온다.
30년 전 컴퓨터 산업에서 국제적 표준이 존재하지 않아서 야기된 문제를 서비스로봇 산업이 가지고 있다. 특히 표준의 부재는 서비스로봇 산업의 형식과 개발을 경직되게 하여 서비스로봇들은 가격이 높은 편이다.
1980년도 시장에는 서로 다른 표준의 많은 개인용 컴퓨터가 있었다. 1982년 IBM이 BIOS를 제외한 IBM PC의 기술적 데이터를 공개했다. 많은 회사들이 따로 생산하던 하드웨어를 동일한 규격으로 생산하게 되었다. 마이크로소프트가 제작한 DOS는 IBM PC의 소프트웨어와 하드웨어를 분리하게 되었으며, 컴퓨터의 CPU, 메모리, 하드디스크, 디스플레이카드, CRT모디터, 키보드, 마우스 등 많은 기능적 모듈이 표준화 되었다. 이러한 다각화가 많은 모듈 전문제조사와 통합전문가들의 등장으로 오늘날의 PC산업이 발전을 하게 되었다.
서비스로봇 산업은 컴퓨터 산업의 70년대와 같이 개별화 되어 있는 것이 유사하다. 또한, 동일한 기능을 제공하는 서비스로봇들은 1980년대 초반의 컴퓨터들과도 유사하다.
서비스로봇의 모듈화를 위한 참조할 만한 모듈 아키텍처나 세계적으로 널리 사용되는 국제표준은 없고, 서비스로봇 모듈에 관한 모듈화나 표준화가 아직 완성되지 않았다. 로봇은 아직 전통적 디자인 방식으로 개발되고 생산되고 있다. 매번 로봇을 디자인한 개발자는 하위의 하드웨어 제어 소프트웨어 개발에서부터 상위의 응용소프트웨어 개발까지 모두를 매번 반복 수행한다. 즉, 서비스로봇의 개발에 사용할 수 있는 일관된 모듈 아키텍처와 표준이 존재하지 않기 때문에 서비스로봇의 R&D 과정과 생산 과정에서도 로봇은 개별적인 아키텍처로 개발되어서 많은 분량의 반복적인 일이 비효율적으로 수행된다.
다양한 기능적 모듈은 다른 시스템에서는 교체나 재사용이 가능하지 않다. 노동의 분화에 따른 전문화된 산업체인을 이끌어내는지 못한다. 결과적으로 R&D 과정은 매우 길어지고 생산 과정은 많아지게 되어 로봇은 비싸진다. 이러한 상황의 서비스로봇 개발 상태는 새로운 산업으로 형성하고 발전하는 저해 요인이 된다.
현재 로봇 소프트웨어 부분에서는 소프트웨어 모듈로 로봇 소프트웨어를 재구성하기 위한 여러 시도로 소프트웨어 플랫폼인 OPRoS(Open Platform for Robotic Servi-ces), ROS(Robot Operating System), Open-RTM(open Robot-Technology Middleware)을 개발하여 사용하고 있다. 그러나 이러한 플랫폼들은 국제 표준이 아니다. 물론 openRTM의 기본이 되는 RT 컴포넌트(RTC)는 OMG에서 표준이 되어 있지만, 플랫폼의 복잡성 때문에 많이 사용되지 못하고 있다.
모듈화 기술은 앞서 언급한 문제의 주요한 해결책이며, 로봇 산업의 필수 요구사항이다. 서비스로봇의 빠른 생태계 구축과 관련 기술 및 산업이 발전하기 위해서는 로봇 모듈화 표준 기술을 촉진하는 것이 필요하다. 서비스로봇의 모듈화 표준은 전통적 로봇 모델의 개발, 생산, 통합, 판매, 애프터서비스의 방식을 개선하고 혁신하게 될 것이다. 서비스로봇의 라이프사이클에서 ‘신속한 통합, 낮은 비용, 쉬운 유지보수’ 등을 달성할 것으로 기대되며, 다음과 변화를 유도할 것으로 예상되기 때문에 모듈화 표준을 해야 한다.
· R&D 관련하여, 반복적인 연구와 개발은 지양하고 개발주기를 짧게 하고, 개발비용을 낮추고, 연구와 개발의 프로세스를 효과적으로 개선한다.
· 상품과 관련하여, 모듈화 표준은 전문화와 서비스로봇의 기능적 모듈의 대량생산으로 비용을 절감한다.
· 한 로봇에서 사용되는 다양한 서비스 기능들을 다른 서비스로봇에서도 사용되며, 이러한 서비스 기능을 전이하는 것 또한 높은 수준의 전문지식이 요구되지 않는다. 신속하고 유연하게 서비스로봇의 서비스들을 제공받게 된다. 이것이 비용을 절감하고 로봇의 신뢰성을 향상시키고 사용자에게 다양한 서비스를 제공할 수 있는 새로운 길을 열게 된다.
· 판매와 관련하여, 에이전트와 사용자 간의 판매망 형성이 가능하다.
· 사용자와 관련하여, 양질의 로봇을 적절한 가격으로 구매할 수 있으며, 필요시 필요한 모듈들을 구입해 연결하여 새로운 서비스를 제공받을 수 있다.
· 애프터서비스에 관련하여, 로봇을 쉽게 유지 관리할 수 있는 공급자 간의 노동의 분업이 이루어질 것이다.
즉, 로봇의 모듈화 표준 기술은 다양하게 사회에 긍정적인 영향을 줄 수 있기 때문에 매우 중요하다.
표준화 활동
지난 2012년 12월 ISO TC184/SC2 WG8내에 로봇 모듈화 관련 스터디 그룹인 SG Modularity를 구성했다. SG Modularity에서는 2013년 ICRA에서 Robot Modularity 워크숍을 개최하여 세계 각국의 산업체 인력과 연구자들이 모여 산업용 로봇, 의료용 로봇, 서비스로봇 등의 분야에서 모듈화의 필요성이 존재함을 공유했다.
이에 서비스로봇의 모듈화 관련 표준화 작업을 위한 새로운 WG(working Group)를 만들기 위하여 약 1년 동안 문서 작업하고 제출하여 SC2로부터 새로운 WG으로 승인받았다. 그림 3은 이러한 작업의 하나로 SG modularity에서 만들어진 문서에서 발췌한 그림이다.

그림 3. 서비스로봇 모듈화의 하드웨어 모듈과 소프트웨어 모듈의 결합
그림 3은 그림 2와 비슷하지만 각 모듈 간 인터페이스를 정의하였고, 아마 새로운 WG에서는 이러한 인터페이스를 정의하는 것이 주 목적이 될 것으로 예상한다. 즉, 2014년도 6월에 SG Modularity는 새로운 WG인 WG10으로 발족되어서, 10월 회의 시 하드웨어와 소프트웨어 모듈화 관련 국제표준화 기구 및 범용적으로 사용되는 표준을 조사하고 있다. 이 표준 문서는 기본적으로 문서화되어 있는 것을 원칙으로 하고 있다. WG8의 SG Modularity 의 생성부터 WG10의 생성까지 일련의 과정이 표 1에 표시되어 있다.
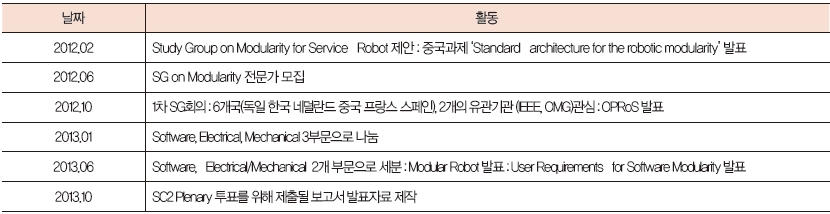
표 1. WG8의 스터디그룹에서 WG10의 표준화 활동
한국은 소프트웨어 모듈 관점에서 소프트웨어 플랫폼과 관련 컴포넌트를 개발하여 다양한 서비스를 수행한 바 있어, 소프트웨어 모듈화 관련 국제 표준화에 동참하여 국내의 기술로 개발된 소프트웨어 플랫폼을 세계화하는 데 역점을 두어 적극 참여하고 있다.
국내에서는 지능형로봇표준포럼에서 소프트웨어 및 하드웨어 관련된 모듈 관련 표준들을 개발해 발표하고 있다[5]. 이 표준들 중에 의미 있는 것들을 한국 표준으로 제안하고 있다. 특히 소프트웨어 모듈 중 기본이 되는 컴포넌트의 인터페이스와 동작과 관련된 표준을 한국 표준으로 제안하고 있는 중이다.
또한, 앞에서 언급하였지만 OMG라는 국제단체에서는 일본의 제안으로 RT 컴포넌트를 표준으로 제정했고, 이를 기반으로 일본에서는 openRTM을 개발하여 배포하고 있다. 또한, 현재 국제적으로 많이 사용되고 있는 로봇 SW 플랫폼은 ROS이지만 규격화 관련 작업은 거의 되어 있지 못하고 있어, ROS를 국제 표준화하는데 많은 문제점이 있을 것으로 생각된다.
중국은 모듈화 관련 국제 표준화 활동을 적극적으로 수행하고 있지만, 관련 기술은 축적하지 못하고 있는 상태로 보인다. 그러나 현재 중국의 로봇 시장이 급팽창하고 있고 이를 적극적으로 활용하여 모듈화 관련 국제 표준을 빠른 시간 내에 제정하고자 노력하고 있는 중이다. 특히 중국은 소프트웨어 모듈보다는 기계적·전기적 모듈의 표준에 더 관심을 가지고 있다. 다시 말하자면 기계적·전기적 모듈 중에서 매니퓰레이터 하나의 조인트 모듈에 대한 표준에 관심을 가지고 있다.
맺는말
서비스로봇의 모듈화는 서비스로봇 산업의 활성화를 위해서 매우 필요한 작업으로 인식되어 국제 표준화 작업이 시작되었다. 그러나 이 표준화 작업은 많은 장벽이 존재할 것으로 예상되어 전문가들의 많은 아이디어가 나와야 할 것으로 생각된다. 특히 기계적 인터페이스에서 로봇의 크기와 무게, 사용 전력, 안전도 등에 따라 인터페이스를 정의하는 문제, 특히 전기적 인터페이스는 국제 표준도 많으므로, 이 중에서 후보를 정하는 기준 문제 등 다양한 문제가 존재한다. 이러한 장벽을 넘어 표준이 되면 PC 시장의 빅뱅처럼 로봇 산업의 빅뱅이 올 것으로 기대된다.
이러한 모듈 표준은 서비스로봇에 한정되지 않을 것으로 예상된다. 이는 다음과 같은 서비스로봇의 모듈 내용을 보면 알 수 있다. 모터 등의 다양한 구동기, 초음파/카메라/레이저 센서 등의 다양한 센서, 통신, 데이터베이스, 보안, 내비게이션, 인식, 지능, 매니퓰레이션 등 다양한 하드웨어 모듈과 소프트웨어 모듈이 존재한다. 이러한 모듈들은 기본적으로 가상물리시스템(Cyber Physical System)과 현재의 공장, 미래의 공장(스마트 팩토리, 가상 공장) 등에 기본적으로 활용되고 있다. 따라서 사회에 많은 영향을 줄 것으로 예상되기 때문에 준비를 잘해 국제 표준을 선도함으로써 관련 산업에 대해 경쟁력을 갖추도록 해야 한다.
박홍성·김미숙 강원대학교 교수