

로봇 시스템 제어와 응용(5)
한 바퀴 구동 시스템 제어와 응용
정슬 충남대 메카트로닉스공학과 교수 (jungs@cnu.ac.kr)
지난 호에서는 수송체 시스템으로 사용되는 두 바퀴 구동 이동로봇 시스템의 제어와 응용을 다루었다. 이번 호에서는 보다 도전적인 한 바퀴 구동 이동로봇에 대해 다루고자 한다. 두 바퀴의 경우 측면은 안정적이라 주행방향의 균형제어가 중요한 반면, 한 바퀴는 주행방향은 물론 측면 방향의 균형도 유지해야 하는 어려움이 있다. 한 바퀴로 균형을 유지하여 주행하므로 설계에서부터 제어까지 완성하기가 쉽지 않은 시스템이다. 하지만 도전적인 자동화 기술의 좋은 사례임은 틀림이 없어 소개하고자 한다.
외발자전거 타는 로봇
우리는 종종 외발자전거를 타는 사람들을 서커스 공연장이나 공원에서 접한다. 외발자전거 위에서 저글링을 하기도 하고 장애물을 넘기도 하는 묘기들을 본 적이 있다. 최근에는 외발자전거로 운동하는 사람들이 늘어나는 추세이다. 외발자전거를 타는 것은 두발자전거를 타기보다 매우 어렵다.
그렇다면 로봇이 외발자전거를 타는 것은 가능할까? 일본의 무라타 회사는 무라타 걸이란 외발 타는 로봇을 만들어 선보였다. 무라타 회사는 주로 전자부품을 생산하는 회사로 자신의 제품인 센서를 홍보하기 위해 한 바퀴로 균형을 유지하는 로봇을 선보인 것이다[1].
한 바퀴로 구동하는 로봇의 핵심기술은 무엇일까? 넘어지지 않고 균형을 유지하는 기술이다[2]. 전 호에서 소개한 두 바퀴 로봇의 경우에는 측면으로 바퀴가 놓여 있어 전진방향의 균형 유지가 필요하다. 그림 1의 무라타 보이의 경우에는 두 바퀴가 앞뒤로 놓여 있어 측면방향의 균형유지 기술이 필요하다. 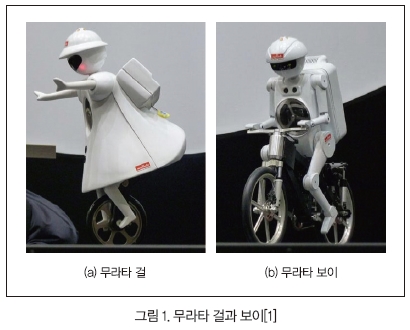
그리고 외바퀴의 무리타 걸에서는 모든 방향에서의 균형 유지 기술이 필요하게 된다.
그림 1의 무라타 걸과 보이는 실제 크기가 작으므로 작은 힘으로 균형을 유지할 수 있지만, 인형이 아니고 실제 사람일 경우에는 균형을 유지할 큰 힘이 필요하다.
따라서 본 호에서는 자이로 효과를 이용한 한 바퀴 구동 로봇의 제작과정과 제어방법을 소개하고 성공적인 모델에 이르기까지 어렵고 힘든 점을 독자들과 나누고자 한다. 이를 바탕으로 다음에는 사람이 탈 수 있는 수송체 시스템으로 발전할 수 있게 하는 것이 궁극적인 연구의 목적이다.
자이로스코픽 효과
자이로스코픽 효과(줄여서 자이로 효과)는 회전하는 시스템에서 나타나는 현상으로 서로 인접한 축의 속도 간의 상관관계에서 나타나는 효과이다. 그림 2에서 보면 피치(pitch)방향으로 고속으로 회전하는 플라이휠에 수직한 방향, 즉 롤(roll)방향으로 플라이휠을 움직이면 피치와 롤에 수직한 요(yaw)방향으로 움직임이 생성되는데 이를 자이로 효과라한다. 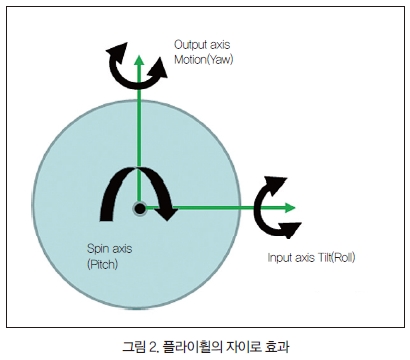
이 효과를 이용하면 한 바퀴로 구동하는 이동로봇이 넘어지지 않고 움직이는 로봇이 된다. 균형을 유지하는 롤 각도를 검출하여 플라이휠을 움직이면 넘어지지 않도록 요방향의 움직임이 생성되는 것이다. 그러므로 한 바퀴 로봇에서 고려해야 할 가장 중요한 것은 자이로 효과를 효율적으로 만들어 내는 플라이휠 시스템의 설계와 제작이다. 플라이휠의 크기와 무게 그리고 회전 속도 등이 설계의 주요 요소들이 된다.
결국, 이 플라이휠 시스템을 한 바퀴 안에 장착하면 한 바퀴로봇이 되는 것이다.
자이로스코픽 효과를 이용한 Gyrover
미국 카네기 멜론 대학의 Xu 교수는 수년간 한 바퀴 구동 이동로봇 Gyrover에 대한 연구를 해왔다[3-7]. 연구 초기에 한 바퀴 구동 이동로봇의 목적은 우주 로봇의 하나로 타 행성에서 스스로 움직이며 자료를 수집하는 용도로 제작됐다. 그림 3에 한 바퀴 구동 이동로봇의 실제 모습이 나타나 있다.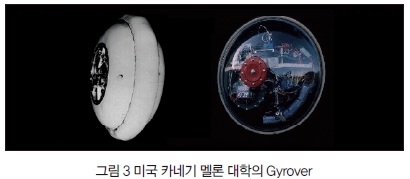
그 밖에도 한 바퀴 형태의 이동로봇에 대한 연구는 여러 곳에서 진행됐다[8-13].
한 바퀴 구동 로봇
충남대 ISEE 실험실[14]에서는 자이로 효과를 이용한 한 바퀴 구동 이동로봇에 대한 연구를 꾸준히 해왔다. 수년 동안 여러 번의 시행착오 과정을 거치며 연구를 수행했다.
한 바퀴 안에 모든 하드웨어를 장착해야 하므로 설계가 매우 어렵다. 또한, 로봇의 전체 무게를 움직이도록 자이로 효과를 이용한 힘을 생성하기 위해서는 그에 맞는 플라이휠 시스템을 설계해야 한다. 디스크의 크기와 무게는 얼마인지, 회전수는 얼마로 해야 하는지 등 자이로 효과를 충분히 생성할 수 있는 플라이휠을 설계하는 것이 중요하다.
1. 플라이휠의 설계와 제어
실험 초기에 자이로 효과를 실험하기 위해 다양한 크기와 모양의 플라이휠을 제작했다. 그림 4에는 거치대에 플라이휠이 놓여 있다. 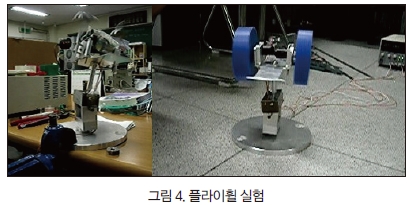
모터로 플라이휠의 회전 속도를 올려가면서 자이로 효과를 측정해 보았다.
2. 한 바퀴 구동 이동로봇
플라이휠 실험에 이어 한 바퀴 이동로봇을 제작해 보았다. 초기에는 균형을 유지하는 데 실패해서 설계의 시행착오를 여러 번 거쳤다. 그림 5에 보인 것처럼 자전거 바퀴에 플라이휠을 설계하기도 하고 작은 바퀴에 설계해 보았으나 장시간 안정적인 균형과 주행은 실패했다. 
그 이유로는 플라이휠의 설계가 잘못되었기 때문이다. 또한, 고속으로 회전하는 플라이휠의 진동문제를 구체적으로 해결하지 못했다.
충남대 ISEE GYROBO
1. 시스템의 재설계
여러 번의 설계 실패에 따른 경험을 통해서 플라이휠을 몰입형으로 설계하고 로봇을 재설계했다. 그림 6에서 보면 플라이휠의 진동을 줄이기 위해 하우징 안에 설계했다. 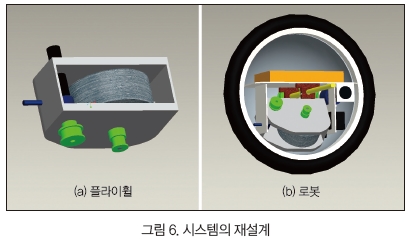
또한, 바퀴 안에 플라이휠을 내장하는 것도 휠을 타고 움직일 수 있도록 설계했다.
그림 7은 첫 번째 몰입형 플라이휠의 설계로 구동하는 자이로보이다. 
그림 8에 보인 것처럼 이전 모델보다 오랜 시간 균형을 유지하며 주행했지만, 지속적인 운전은 불가능했다[15].
2. GYROBO(자이로보)
마찬가지로 여러 번의 설계 변경을 통해 마지막으로 성공한 자이로보가 그림 9에 나타나 있다[16].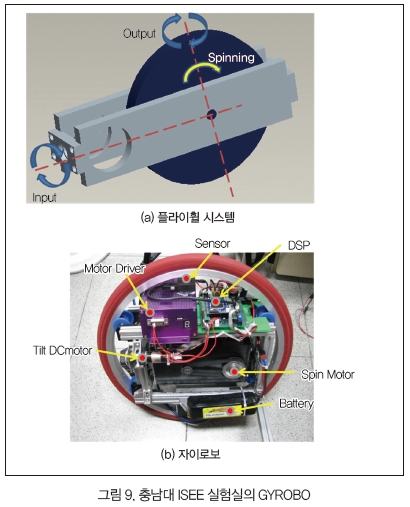
시스템 전체 제어를 위해서 DSP를 사용하였고 제어 주기는 10ms로 설정했다. 먼저 센서는 3축의 자이로 센서를 사용하였고, Roll의 각도와 각속도, Yaw의 각속도 값을 제어에 사용했다.
제어기로 DSP를 사용하여 제어알고리즘 및 센서의 필터 및 신호처리, 양쪽 모터의 PWM 공급, 엔코더 카운터의 역할을 수행한다. 그림 10은 내부 하드웨어 구성을 잘 보여준다. 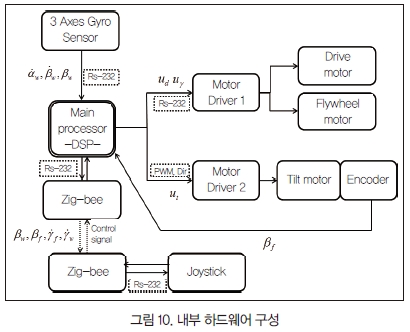
제어에서 가장 중요한 부분이 고속으로 회전하는 플라이휠을 넘어지지 않도록 틸팅하는 것이다. 그림 11에는 간단한 PD제어 방식을 보여준다. 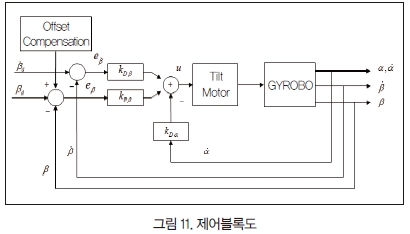
제어의 핵심은 로봇의 균형을 유지하기 위해 계속해서 플라이휠이 한쪽으로 기우는 현상을 어떻게 해결하느냐 하는 것이다. 이는 자전거가 넘어지지 않게 하려고 넘어지는 방향으로 핸들을 계속 돌리는 것과 같은 원리이다. 이처럼 플라이휠이 계속 한쪽으로 기울면 결국 로봇은 쓰러지게 된다. 이러한 쏠림 현상을 방지하기 위해 균형 각도에 따른 게인값을 달리하는 게인 스케줄링 방법을 사용했다.
여기서 는 제어기의 이득값이고 는 균형각이다.
3. 실험평가
(1) 균형유지실험
먼저 그림 11에서 각도 오프셋을 보상하지 않고 실험했다.
그림 12에는 플라이휠 각도와 한 바퀴 로봇의 각도가 나타나 있다. 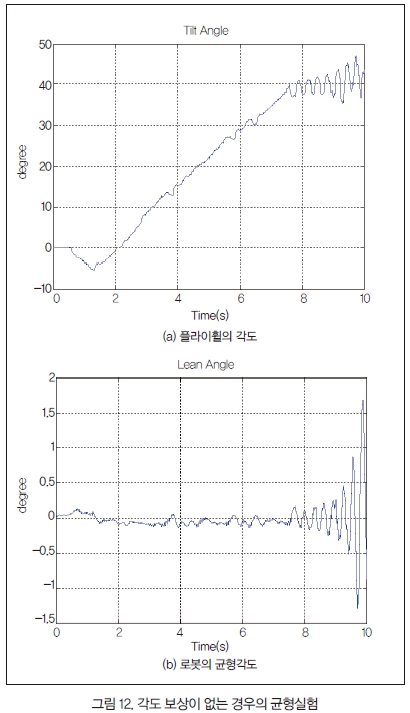
그림 12(a)에서 보면 플라이휠의 각도가 한쪽으로 계속 증가하는 것을 볼 수 있다. 초기에는 0도였다가 40도까지 기운 다음 더는 기울지 못하게 되어 로봇은 쓰러지게 된다. 그림 12(b)에서 보면 8초 이후에 로봇이 쓰러지는 것을 볼 수 있다.
그림 13은 성공적으로 균형을 유지하고 있는 로봇의 모습을 보여준다. 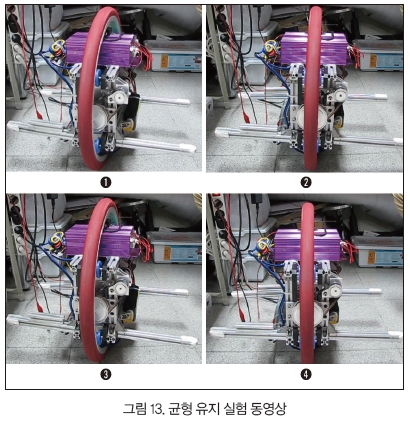
장시간 균형을 유지하기 위해 플라이휠이 한쪽으로 기우는 현상을 방지해야 한다. 플라이휠은 균형을 유지하기 위한 힘을 생성하기 위해 계속해서 움직이는데 이때 한쪽 방향으로 움직이는 현상이 발생되어 그림 12처럼 결국에는 쓰러지게 된다. 따라서 이를 방지하기 위해서는 플라이휠의 각도가 발산하지 않도록 제어를 해야 한다. 이를 해결하기 위해 균형각도를 보상하는 방식을 사용했다.
그림 14에서 보면 플라이휠의 각도가 15초까지 발산하다가 다시 원점으로 수렴하는 것을 볼 수 있다. 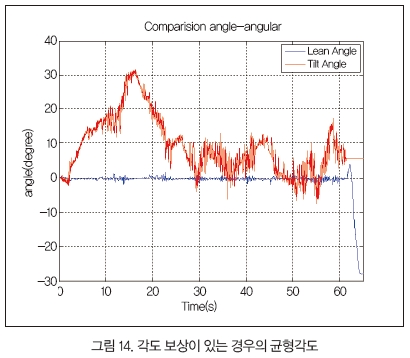
이때 계속 각도가 발산하면 결국 로봇은 넘어지게 된다. 그림 14를 보면 자이로보의 균형각은 계속 유지가 되는 것을 볼 수 있다. 자이로보의 균형을 유지하기 위해 회전하고 있는 플라이휠은 계속적으로 움직인다. 60초 후에는 전원을 꺼서 멈추게 된다.
(2) 실내 곡선 주행실험
다음은 주행하며 균형을 유지하는 실험으로 실내에서 곡선을 주행하는 실험을 했다. 그림 15는 좁은 공간에서 균형을 유지하며 회전하는 실험을 보여준다.
(3) 실외 주행실험
실내에서 균형유지 실험을 성공한 다음 실외에서 주행실험을 했다. 그림 16에서 보면 균형을 유지하며 주행하는 것을 볼 수 있다.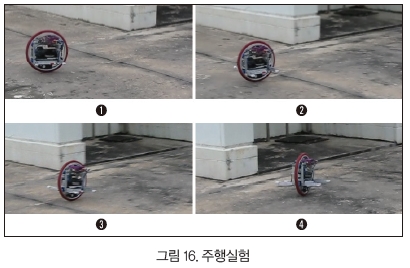
한 바퀴 구동 수송체 시스템
전 호에서는 두 바퀴로 이동하는 수송체 시스템에 대해 소개했다. 두 바퀴 이동로봇의 경우에 균형을 유지하는 것이 가장 중요하므로 이를 위한 연구가 활발하게 진행되고 있다.
한 바퀴 구동 이동로봇의 제어 기술이 도전적이지만, 응용 면에서는 제한적인 것이 사실이다. 카네기 멜론 대학에서는 우주 탐사용 로봇으로 개발했지만, 상용으로의 응용은 매우 제한적이다. 따라서 연구의 방향은 이 한 바퀴 구동 이동로봇의 균형주행 기술을 어떻게 사람이 탈 수 있는 수송체 시스템에 응용할 것인가이다.
그림 17(a)의 구조와 그림 17(b)의 자이로 싸이클은 하나의 응용 사례로 볼 수 있다. 현재 사람이 올라탈 수 있도록 연구가 진행 중이다.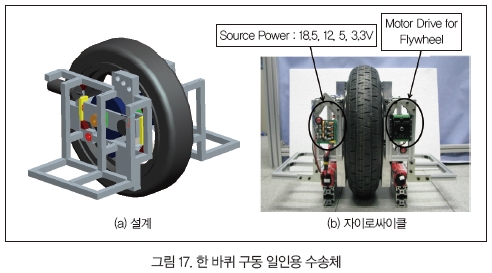
그림 18은 사람이 탑승하고 실내에서 주행하는 모습이다. 
옆으로의 균형은 보조바퀴를 통해 유지하며 앞으로 주행하고 있다. 궁극적으로는 보조바퀴를 제거한 상태에서 균형을 유지하면서 주행하는 것이다.
맺음말
이 글에서는 한 바퀴로 구동하는 이동로봇을 소개했다. 자이로 효과를 이용하여 넘어지지 않게 했으며, 이 효과를 생성하기 위해 플라이휠 시스템을 설계하고 제어했다. 한 바퀴 로봇 자이로보를 완성하기까지 여러 번의 시행착오를 거쳤다.
성공적인 자이로보의 핵심은 설계 기술과 제어 기술이다. 먼저 진동을 줄이기 위한 설계가 필요하고 모든 하드웨어를 가운데 놓아 무게중심이 가운데 위치하게 한다. 그다음에 제어에서는 플라이휠이 한쪽 방향으로 쏠리는 현상을 방지하기 위해 각도 오프셋값으로 보상하는 게인 스케줄링 방법을 사용하는 것이다.
현재는 이러한 균형제어 기술이 사람이 탑승할 수 있는 실제 수송체 시스템에 사용되도록 연구 중이다.