




글로벌 경기 침체로 산업 자동화 시장에 전반적인 어려움이 가속화되고 있다. 생산라인 투자가 전면 보류되고, 효율성과 원가절감을 선호하고 있는 추세다. 이에 발맞춰 전기 또는 기계적 장치의 일부를 소프트웨어로 대체하는 방식이 점차 주목받고 있다. 소프트웨어 제어기는 하드웨어 제어기에서 볼 수 없는 뛰어난 유연성과 이식성 등의 다양한 장점을 지니고 있어 자동화 산업과 로봇 산업에서 효율적인 수행 능력을 발휘할 것으로 기대된다.
왜 S/W 제어기인가?
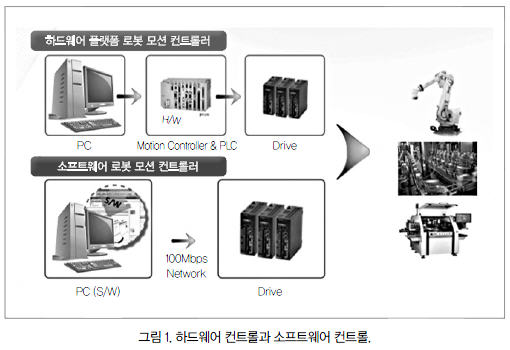
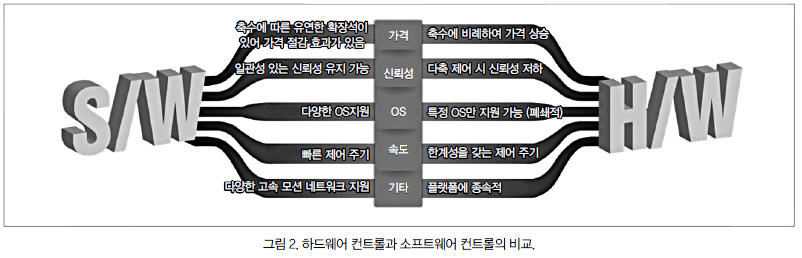
현재 자동화 산업 시장은 잇따른 경기 악화로 효율성과 원가절감을 선호하는 추세이다. 이에 따라 PLC, 모션, 로봇 제어에 대해 기술적 통합의 요구가 증가하고 있다. 하지만, 기존 하드웨어 제어기에는 이러한 기술적인 통합의 한계점과 제한이 있어, 소프트웨어 제어기의 기술 개발이 절실해지고 있다.
일찍이 소프트웨어 제어기는 독일 등과 같은 고급 기술력을 지닌 나라에서 이미 개발되어 산업에 적용되고 있지만, 국내에서는 기술력 부족으로 TwinCAT, ACS Motion과 같은 외국제품에 의존하고 있다.
국내 소프트웨어 제어기는 여러 특장점을 지닌 제어기를 통해 국산화가 진행 중이며, 그 프로젝트 주관을 컨벡스가 하고 있다. 곧 개발될 소프트웨어 제어기(ARIA: Advanced Robot control for Industrial Auto-mation)는 유연성과 확장성, 신뢰성, 빠른 제어 주기와 이식성 등의 특징을 지닌 제어기가 될 것이며, 국내 최초, 최고의 소프트웨어 제어기를 목표로 삼고 있다.
S/W 제어기 외국산 제품이 장악
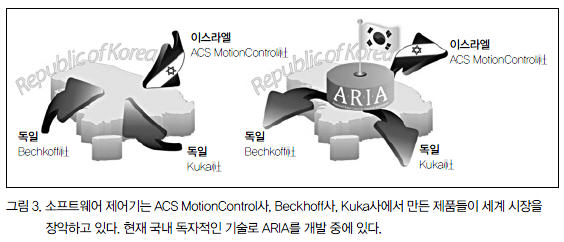
현재 소프트웨어 제어기는 해외의 여러 회사에서 만든 제품이 세계 시장을 장악하고 있다. 이스라엘의 ACS MotionControl社, 독일의 Beckhoff社와 Kuka社에서 만든 제품들이 대표적이다.
이들 회사의 제품 특징을 살펴보면, ACS motion은 64축수 지원, 2Khz의 모션 사이클과 개방형 구조의 특징, 모션 제어 전용 언어를 제공하는 특징 등이 있다. 하지만, 로봇 제어기가 아니라는 단점이 있으며, 고속 모션 네트워크가 한 가지만을 지원한다는 단점이 있다.
Beckhoff의 TwinCAT은 모션 전용 소프트웨어 제어기로써 C++ 객체 지향 언어 지원, 64축수 지원, 1Khz의 모션 사이클, 개방형 구조, 지원 OS가 2개라는 특징이 있지만, 이것 역시 로봇 제어기가 아니라는 단점이 있다.
Kuka의 KMC 제어기는 64축 지원과 로봇 제어기로써 뛰어난 성능을 보이지만, 축수 지원의 한계와 비개방형 구조라는 단점이 있다. 실제로 구동되는 로봇의 축수는 16축 이하로 구동되며, 지원 OS는 1가지이다.
국내 독자적인 기술의 S/W 제어기 ‘ARIA’
외국산 제품의 장점은 살리고, 취약점을 보완한 제품 ‘ARIA(Advanced Robot Control for Industrial Automation)’는 현재 국가 과제를 통해 개발 진행 중이다. ARIA는 로봇 제어기를 탑재한 개방형 구조, 빠른 모션 사이클 지원, 다양한 고속 모션 네트워크 지원, 다양한 OS 지원을 할 수 있게 설계될 예정이다. 향후, PLC 통합이 가능하며 이식성 및 여러 특징을 개발하여 국내 독자적인 소프트웨어 제어기로 발전시킬 계획이다.
1. ARIA 사양과 특장점
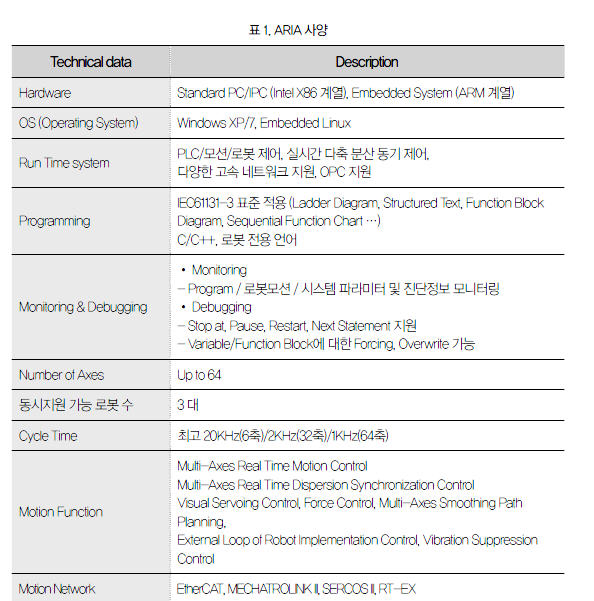
ARIA의 사양은 표 1과 같다. 또한, 특장점은 다음 3가지로 정리할 수 있다.
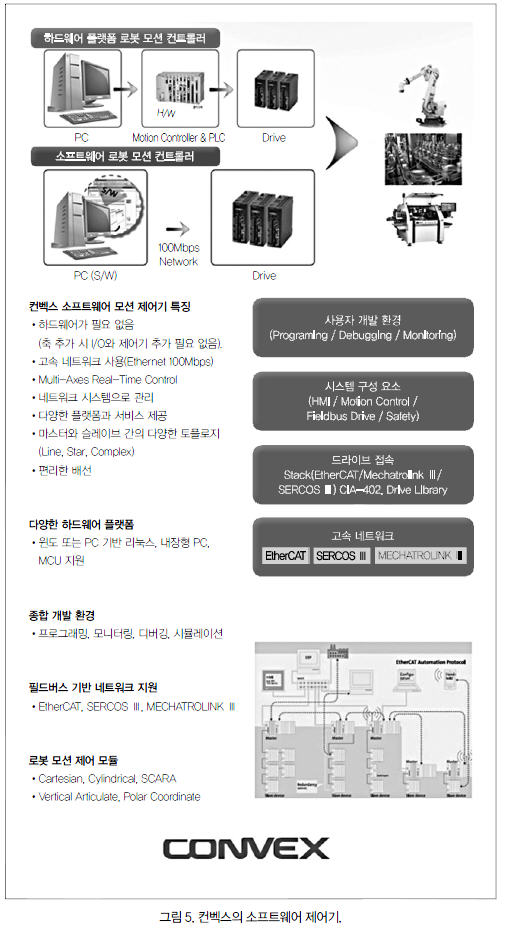
1) 개방형 로봇 제어기 : IEC 61131-3 표준 프로그래밍 언어 채택, EtherCAT, SERCOS 등 범용 고속 모션 네트워크 채택, OPC 표준 인터페이스 제공.
2) 하드웨어에 의존하지 않는 제어기 (Flexibility) : 특정 하드웨어 플랫폼에 의존적이지 않는 플랫폼, 유연하고 이식 가능한 소프트웨어 기반 Realtime Virtual Robot Control 플랫폼.
3) 고속 네트워크를 지닌 제어기 : 실시간 모션 제어 런타임 엔진(20khz/6축), EtherCAT 등의 고속 네트워크 지원, 모션·PLC 로직에 대한 실시간 지원, 확장 가능한 컴포넌트 구조.
ARIA 적용 분야와 기대 효과
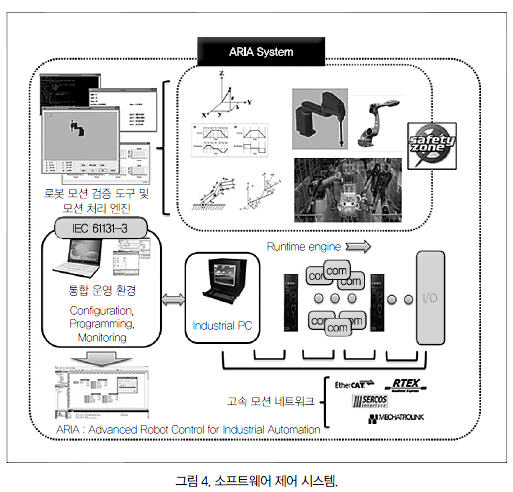
소프트웨어 제어기의 기술력은 런타임 시스템 엔진을 기반으로 사용자 통합 환경 시스템 구축, 동역학 및 기구학 모듈, 빠른 모션 제어 주기 및 고속 네트워크 등의 다양한 기술 개발이 요구된다.
사용 시 가장 먼저 접하게 되는 사용자 통합 환경 시스템의 설계이다. 실제 사용자가 필요 구성 또는 필요한 파라미터 값으로 로봇과 각 축을 구동할 수 있게 설정되어야 하며, 각각의 사용자 필요조건 값에 대해서도 개발이 이루어져야 한다.
이를 기반으로 실제 로봇이나 장비에 입력 값이 들어가게 되어 구동된다. 구동될 때의 로봇의 움직임은 동역학 및 기구학 모듈과 모션 프로파일 생성의 호환을 통해 구동이 되는데, 모션 구현에 대한 기술력이 뒷받침되어야 한다. 이 기술력은 로봇의 PTP, CIRC 같은 모션 등의 구현이 요구되며 다양한 모션이 사용될 때 필요한 필수 기술이다.
로봇을 구동할 때 연속적이고 부드러운 모션을 가하기 위해선 실시간을 공급할 수 있는 고속 모션 네트워크(EtherCAT, Mechatrolink III, SERCOS-III 등)와 빠른 모션 제어 주기가 있어야 하고, 이러한 부분을 해내기 위해서는 제어기의 엔진이라고 할 수 있는 런타임 시스템이 최적화되도록 개발되어야 한다.
또한, 실제 로봇 제어기를 어디서든 적용하기 위해서는 공통적으로 호환할 수 있는 언어로 제작이 되어야 하는데 로봇 제어기를 위한 프로그래밍 언어인 IEC 61131-3 표준 로봇 제어 언어를 개발해야 하며, 이 밖에도 안전 기능, 동역학 모듈 검증하는 등 여러 가지 부수적인 개발도 병행해야 한다. 이러한 기술들이 모두 통합되어야 경쟁력 있는 소프트웨어 제어기가 만들어진다.
소프트웨어 제어 시스템은 로봇을 비롯한 다양한 분야에 적용할 수 있다. 이 시스템은 SCARA, 6축 다관절 로봇 등에 적용 가능한 시뮬레이터(동역학 및 기구학 검증 프로그램)를 포함하고 있어 기구 및 동역학적인 검증을 이룰 수 있는데, 이러한 검증은 로봇을 구동하는 데에 있어 움직임과 토크, 속도, 위치 값을 실시간으로 확인할 수 있는 장점이 있다.
또한, 다양한 장비에도 적용이 가능하며 특히, 컨베이어 벨트 시스템, 인공관절, 반도체 조립장비, 공작기계, 물류이송로봇, 물류 및 공정 로봇 등에 적용이 가능하다. 전반적인 자동화 설비에 폭넓게 적용할 수 있어 향후 다양한 분야에서 적용될 것으로 예상이 된다.
ARIA 향후 과제와 미래
로봇 제어기 기술은 하드웨어적인 부분을 소프트웨어적으로 승화하려는 조짐과 실제 사용자가 사용하기 쉬운 이식성과 유연성, 빠른 고속 네트워크로 구동하려는 방향으로 나아가고 있다.
이런 세계 흐름에 발맞춰 기존 하드웨어 제어 시스템을 대체할만한 높은 호환성과 신뢰성을 갖춘 소프트웨어 제어기를 설계하고 만드는 것이 ARIA의 개발 목표가 될 것이다.
이를 계기로 독일과 해외 여러 나라에 잠식당한 국내 소프트웨어 제어기 시장을 국산화하는 것이 큰 과제이다. 또한, 제어기와 연결되는 장비나 로봇으로서, 그리고 뛰어난 제어기로서의 역량을 발휘할 아이템을 찾아야 할 것이다. 이러한 과제들이 ARIA의 개발에 중대한 영향을 끼칠 것이다. 목표대로 순조롭게 진행된다면, 2014년에는 국내 최고의 소프트웨어 제어기인 ARIA가 출시될 것이다.
컨벡스 정밀제어사업부








































