
[헬로티]
ISO 12100에서는 ‘위험성 평가’를 위험성 분석 및 위험성 판정으로 이루어진 제반 과정으로 정의한다. 위험성 평가 기법은 다양하며 가장 널리 쓰이는 기법은 HRN(Hazard Rating Number)이다.
국내의 경우도 ‘사업장 위험성 평가에 관한 지침(고용노동부 고시 제2016-17호)’에서 위험성 평가에 관해 다루고 있으며, 위험성은 위해 발생 확률과 위해 심각성의 정도로 정의하며 그 곱으로 표현된다.

고객사를 방문하고 위험성 평가를 위한 회의가 진행되면서 특정 개인의 판단이 회사의 안전기준처럼 적용되고 있는 경우를 종종 보게 된다. 어느 위험원에 대해 안전관리자가 바뀔 때마다 위험성이 달리 추정되고 그에 따라 달리 관리되는 것은 합리적이지 않다.
위험성 평가를 다루기에 앞서 국제표준을 언급하지 않을 수 없다. 여기서 말하는 ‘위험성 평가’는 표준에서 정의하는 ‘위험성 평가’로 특정된다. 세계적으로도 WTO의 TBT (Technical Barriers to Trade) 협정을 통해 공통된 표준, 시험방법 채택으로 무역기술 장벽을 걷어내려는 노력은 계속됐고 현재 국가별 표준의 상당 부분이 ISO/IEC 표준과 내용을 공유하고 있다.
안전표준은 설계 일반원칙/위험성 평가를 다루는 Type A 표준, 안전거리/표면온도/소음 등 특정 안전관점을 다루는 Type B1 표준, 양수제어장치/인터록장치/압력감지장치/방호울 등 안전장치를 다루는 Type B2 표준, 산업용 로봇/포장기/프레스/공작기계 등 특정 기계에 대한 상세사항을 다루는 Type C 표준 등 크게 세 개의 계층으로 나뉜다.
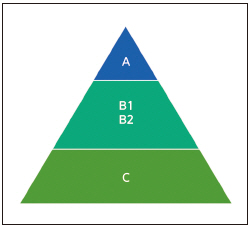
▲ 그림 1. 안전표준 세 개의 계층
상위 계층 표준에서 정의된 범위 및 방향 내에서 하위 계층 표준의 분화 및 발전이 이루어지고 상위 표준의 변화는 하위 표준의 변화를 동반한다.
최근 Type B 표준인 기능 안전 표준이 도입되면서 상당한 양을 차지하는 Type C 표준들이 개정되었거나 진행 중이다.
ISO 12100 기계안전
국제 표준화 기구(ISO)의 ISO 12100에서는 ‘위험성 평가’를 위험성 분석 및 위험성 판정으로 이루어진 제반 과정으로 정의한다.
위험성 분석은 기계의 한계 동작 규정, 위험원 식별, 위험성 산정으로 구성되며 위험성 산정은 위해 심각성과 발생 가능성을 정의한다. 또한, 위험성 판정은 위험도 분석에 근거하여 위험도 감소 목표 달성 여부를 판정하는 것을 말한다.
이러한 정의로부터 위험성 평가 보고서가 대상 기계의 목적 및 특성/위험의 식별(위험원의 식별, 위험원의 위치, 위험의 종류)/발생 시나리오(관련 작업 식별 등)/발생 가능성(접근빈도 및 기간, 위험 상황 발생 가능성 및 회피 가능성)/잔존 위험성의 추정 및 허용 여부 판단 등으로 구성되어야 함을 알 수 있다.
고려해야 할 위험 종류와 위험성 감소 대책 등은 ISO 12100을 따라야 하며 관련 기계에 한정된 또는 위험에 한정된 규격(Type B, C standards)이 있다면 (예: 전기 위험을 다루는 IEC 60204-1), 위험성 평가의 일부는 평가되는 기계에 관련된 보호 대책의 모든 제한사항을 고려하여, 그 규격에 대한 적합성이 달성됨을 보장하는 것을 포함한다. 따라서 위험성평가 과정에서 관련된 표준들과 평가 항목을 비교하는 것은 필수적이다.
위험성 평가 기법은 다양하며 가장 널리 쓰이는 기법은 HRN(Hazard Rating Number)이다. 이러한 평가 기법 및 방법론, 예시 등은 ISO 12100과 통합되기 이전의 ISO 14121-1, -2에서 참조할 수 있다.
국내의 경우도 ‘사업장 위험성 평가에 관한 지침(고용노동부 고시 제2016-17호)’에서 위험성 평가에 관해 다루고 있으며 평가 자체의 내용은 크게 다르지 않다.
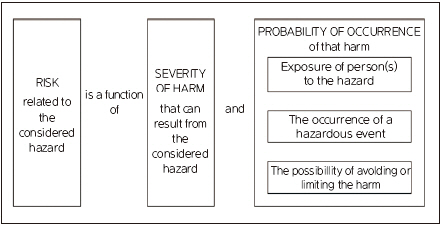
▲ 그림 2. 사업장 위험성 평가에 관한 지침
위험성(또는 위험도)은 위해 발생 확률과 위해 심각성의 정도로 정의하며 그 곱으로 표현된다.
위험성 평가와 기능 안전
과거와 달리 기계의 기능이 복잡해지고 설치/변경/제어가 용이한 인터락 장치 같은 보호장치들로 위험원이 관리되면서 관련 위험을 작업자가 직관적으로 인지하기 어려워지며 안전 관련 기능들의 신뢰성 관리 필요성이 대두되었고 기능 안전 표준으로 불리는 ISO 13849-1이 등장했다.
해당 표준은 안전과 관련된 기능, 즉 기능의 실패가 위험 상황을 초래하는 경우, 해당 기능에 대한 요구사항을 다루고 있으며, 위험 정도를 정량화하여 위험 수준에 따라 기능에 요구하는 수준(PLr : Required Performance Level)을 달리한다. ISO 13849-1은 이러한 PLr을 산정하기 위해 그래프를 이용해 위험성을 평가하는 매우 간단한 방법을 제시하고 있다.
ISO 12100의 위험성 평가가 기계와 관련된 모든 위험을 다루고 있는 반면 기능 안전의 위험성 평가는 전기/유압/공압 등 안전과 관련된 제어에 한정된다. 기능 안전 표준의 적용 범위가 제어에 한정 된다고 하나 위험 정도의 정량화를 위해서는 제어회로만이 대상이 될 수 없으며 기계와 관련된 전반적인 위험이 고려 대상이 된다. 즉 위험성 평가 관점에서 두 표준의 준수는 상호 보완적으로 작용한다.
예로 들어 라이트 커튼과 같은 존재 감시 장치가 기능 안전 요구사항을 준수했다고 하더라도 작업자가 해당 장치를 우회하여 위험원에 접근 가능하거나 위험원과 너무 근거리에 설치하여 기계의 위험 구동부의 정지 이전에 작업자가 위험원에 도달 가능하다면 해당 기능 안전 요구사항의 준수 여부와 상관없이 안전 기능은 실패로 귀결할 것이다.
ISO 12100을 만족하기 위해서는 ISO 13849-1을 만족해야 한다. 따라서 안전 제어시스템과 관련하여 두 표준의 평가 방법을 모두 적용하는 것은 필수적이다. 특히 위험성 평가에서 안전 제어시스템으로 관리될 수 있는 모든 위험에 대해 두 평가방법을 동시에 적용하는 것을 추천한다.
ISO 12100의 평가 방법은 모든 위험에 대해 정량화하여 해당 기계가 가진 모든 위험을 나열하고 개선 우선순위를 파악하는 데 용이하다. 또한, ISO 13849-1의 평가 결과는 인지된 위험의 관리 방법과 관련하여 방호울과 같은 전통적인 고정식 방호 수단이나 인터록 장치 등의 안전 관련 제어 시스템 간의 선택에 도움을 주며 안전 기능에 의해 위험성 감소를 결정한 경우 PLr 산정을 위해 위험성 평가를 다시 실행할 필요가 없어 신속한 설계 실행 등 유연한 대응이 가능해진다.
기능 안전 표준이 도입되면서 많은 표준의 개정이 있었음은 전술하였다. 일례로 전통적인 산업용 로봇 표준에서 로봇과 방호울로 구성된 로봇셀의 경우 로봇의 최대 작동 반경에서 500mm의 안전 이격거리(ISO 13854에서 몸통에 대한 협착 위험을 방지하기 위한 최소 이격거리)를 두고 방호울을 설계해야 했다. 이러한 로봇셀의 크기를 줄이기 위해 1축에 기계적 멈춤장치를 설치하는 정도가 현실적으로 유일한 대응이었다.
하지만 구동드라이브 시스템의 안전 기능 표준인 IEC 61800-5-2에서 기능 안전 요건을 충족하는 Safe Torque Off / Safe Stop / Safe Limited Speed, Torque, Position / Safe Speed Monitor / Safe DIrection / Safe Brake Control 등이 정의되었고 이는 산업용 로봇 표준인 ISO 10218-1, -2에 변화를 가져왔다.
1축뿐만 아닌 모든 축에 또, 방호울의 높이를 넘어가는 영역에도 직교좌표계상 안전영역을 사용할 수 있게 되었고 이는 로봇의 운전영역에 근접한 보호영역의 설정 및 유연한 협동작업 영역의 설정이 가능함을 의미하며, 이를 통해 로봇셀이 점유하는 공간의 최적화가 가능해진다.
위험성 평가에서는 기능 안전 표준을 적용한 최소 사이즈의 로봇셀이 해당 표준의 적용을 근거로 로봇의 최대 작동 반경을 기초로 한 로봇셀과 거의 동일한 잔존 위험도를 갖는 결과로 귀결될 것이다. 셀의 크기뿐 아니라 해당 안전 기능들로 생산작업 시나리오에 따른 유연한 대응이 가능해짐은 물론이다.
안전 수명주기와 위험성 평가
설비에서 발생할 수 있는 위험 관리 측면에서 위험성 평가는 가장 먼저 이루어져야 하는 작업이다. 위험성 평가에서 위험이 인지되지 않거나 위해 발생 시나리오 자체가 간과되는 경우 다음 단계인 안전 기능 사양이 마련될 수 없고 관리 대상에서 누락된다.
또한, 평가에서 위험성이 실제보다 현저히 낮게 평가된다면 적절하지 못한 안전시스템이 구성될 수밖에 없으며 이는 다음 위험성 평가 전 혹은 사고 발생 전까지 인지되지 못할 것이다. 반대로 실제 위험성보다 크게 평가된다면 과도한 투자를 야기하거나 이로 인한 안전시스템의 포기로 이어질 수 있다.
전체적인 안전은 제어 부분만 분리해서 달성할 수 있는 것이 아니다. 마찬가지로 위험성 평가를 안전 기능에만 맞추는 것도 옳지 않다. 안전 기능들 중 상당수는 위해 심각성이 아닌 발생 가능성을 낮추어 전체 위험도를 줄인다. 대부분의 노출 위험원의 경우 적절하게 설계된 물리적 방호 수단으로 접근 빈도 및 발생 가능성을 낮추는 방법이 효과적이다.
국내에서 위험성 평가 서비스를 진행하다 보면 평가의 결과가 발끝막이판 설치, 미끄러짐 위험에 대한 누유 개선 조치, 비좁은 환경 및 복잡한 설비 형상에 따른 전도 위험에 대해 작업자의 안전한 통행방법의 제공 등이 최신의 전기/유압/공압 등의 안전 제어시스템의 신규 설치보다 우선임을 가리키는 경우도 많다. 물론 인지된 위험 모두에 대해 동시 개선조치를 취함이 우선이고 비용 효율적이다.
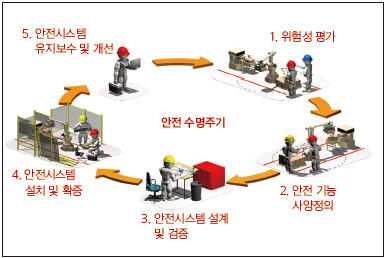
▲ 그림 3. 안전 수명주기
로크웰 오토메이션의 안전 서비스
로크웰 오토메이션은 150여 명의 T□V Rheinland 기능 안전(Functional Safety) 공인 엔지니어를 확보하고 있으며 50여 명의 안전컨설턴트가 활동하고 있다.
로크웰 오토메이션의 안전서비스는 위험성 평가 및 위험원 평가 등으로 이루어진 평가 서비스, 안전회로 분석/안전시스템 검증 등의 검증 서비스, 안전시스템의 설치 등의 엔지니어링 서비스, 안전제품 및 표준 교육 서비스 등 안전 수명주기 전 단계에 걸친 서비스를 제공하고 있다. 또한, 장비제조사를 대상으로 CE 요구사항, 국제표준 및 엔드유저의 안전사양서 등을 기준으로 규제준수컨설팅 및 평가 서비스가 마련되어 있다.
위험성 평가의 경우 안전 사양이 별도로 마련되어 있는 경우 이러한 요구사항을 반영한 보고서 양식 개발 및 평가, 고객 지정 양식을 이용한 평가 등으로 진행되며 특정 주제로 범위를 한정하여 위험원 및 기초 가딩만을 신속하게 평가하는 기초 평가부터 고객 인적자원(운영, 유지보수, 엔지니어링, 생산기술 등)이 참여하는 팀 기반 위험성 평가까지 고객의 요구사항을 만족하기 위한 서비스를 운영 중이다.
국내의 경우 신속한 장비개선 우선순위 선정 및 대략적인 투자 규모 파악을 위해 간략한 가딩 평가보고서 및 안전 기능 사양서를 요청하는 경우도 증가하고 있다.
정회철 _ 로크웰 오토메이션 Customer Support & Maintenance




