
MEMS 마이크의 기본 원리
최근 MEMS 기술이 마이크에 적용됨에 따라 고성능, 소형 마이크를 개발할 수 있게 됐다. MEMS 마이크는 높은 SNR, 저전력 소비, 우수한 감도를 제공하며, 표면 실장 조립 공정과 완전하게 호환되는 초소형 패키지로 출시 가능하다. 또한 MEMS 마이크는 리플로우 솔더링 후 성능상의 변화가 거의 없으며, 온도 특성도 매우 우수하다.
John Widder STMicroelectronics, Inc.
Alessandro Morcelli STMicroelectronics SRL
MEMS 마이크 음향 센서
MEMS(Micro Electro-Mechanical Systems : 미세 전자기계 시스템) 마이크는 실리콘 웨이퍼와 고도로 자동화된 공정을 이용한 반도체 생산라인에서 제조된 음향 센서를 사용한다.
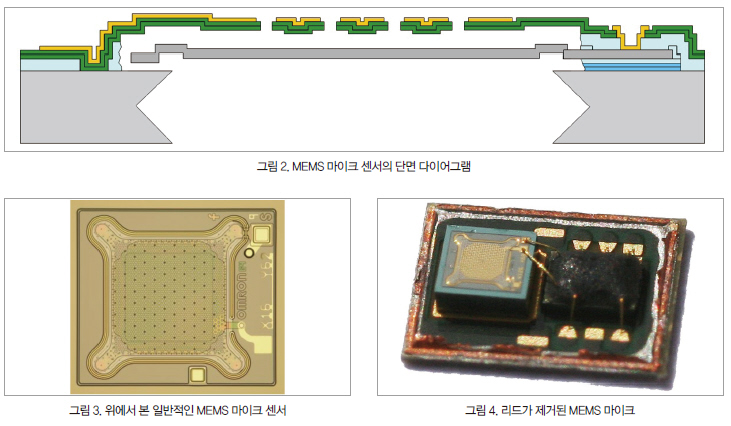
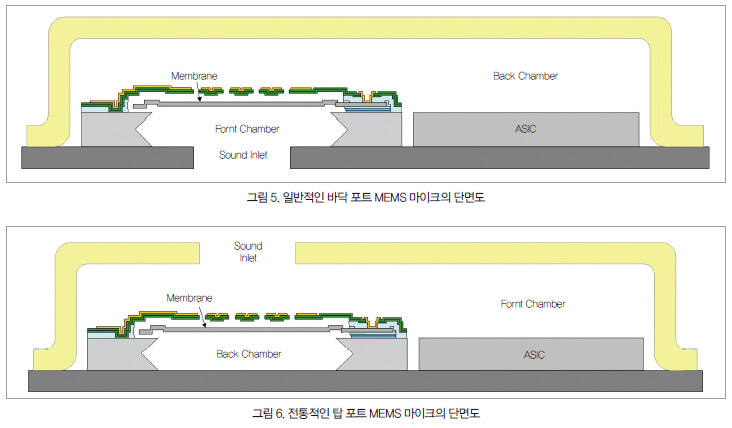
다양한 여러 개의 재료 층을 실리콘 웨이퍼 위에 증착한 후, 원치 않는 재료를 에칭 처리해 제거하면 베이스 웨이퍼에 있는 캐비티 위로 움직이는 멤브레인과 고정된 백플레이트가 만들어진다.
센서 백플레이트는 심한 천공구조이므로 백플레이트를 통해 공기가 쉽게 빠져나가며, 반면에 멤브레인은 얇은 고형 구조이므로 음파에 의한 대기압 변화에 반응해 움직인다.
음파에 의한 대기압 변화로 인해 얇은 멤브레인은 움직이고, 공기가 백플레이트의 구멍을 통해 움직일 때 두께가 두꺼운 백플레이트는 계속 정지된 상태로 있게 된다. 멤브레인의 움직임으로 인해 멤브레인과 백플레이트 사이의 커패시턴스 양이 변하고, 이것이 ASIC에 의해 전기 신호로 전환된다.

MEMS 마이크 ASICs
MEMS 마이크 안에 있는 ASIC은 전하 펌프를 이용해서 마이크 멤브레인에 고정 전하를 올려 놓는다. 그 다음, ASIC은 음파에 대한 반응으로 움직인 멤브레인에서 멤브레인과 고정 백플레이트 사이의 커패시턴스가 변할 때 생긴 전압 변화를 측정한다.
아날로그 MEMS 마이크는 즉각적인 대기압 수준에 비례하는 출력 전압을 만든다. 일반적으로 아날로그 마이크에는 출력, 전력전압(VDD), 접지(ground)와 같이 단 3개의 핀이 있다.
아날로그 MEMS 마이크 인터페이스는 개념적으로 단순하지만, 아날로그 신호는 마이크 출력과 신호를 수신하는 IC 입력 간에 잡음 증가를 피하기 위해 PCB와 배선의 세심한 설계를 필요로 한다.
또한 대부분의 애플리케이션에서는 저소음 오디오 ADC가 필요한데, 이는 아날로그 마이크의 출력을 디지털 포맷으로 바꿔 처리 및 전송하기 위해서이다.
이름에서도 알 수 있듯이, 디지털 MEMS 마이크에는 낮은 논리 레벨과 높은 논리 레벨 사이를 전환하는 디지털 출력이 있다. 대부분의 디지털 마이크에서는 과하게 오버샘플된 단일-비트 데이터 스트림을 만드는 펄스 밀도 변조(PDM)를 사용한다. 펄스 밀도 변조를 사용하는 마이크의 출력상 펄스 밀도는 순간적인 대기압 수준과 비례한다.
펄스 밀도 변조는 클래스 D 증폭기에 사용되는 펄스 폭 변조(PWM)와 비슷하다. 차이점이 있다면, 펄스 폭 변조는 펄스 간 상수 시간을 사용하고 펄스 폭에서 신호를 암호화하는데, 펄스 밀도 변조는 상수 펄스 폭을 사용하고, 펄스 간 시간에서 신호를 암호화 한다는 것이다.
아날로그 마이크에도 있는 출력, 접지 및 VDD 핀 외에 대부분의 디지털 마이크는 클록과 L/R 컨트롤 입력도 갖고 있다. 클록 입력은 센서의 아날로그 신호를 디지털 PDM 신호로 전환하는 델타-시그마 변조기를 제어할 때 사용된다.
디지털 마이크의 일반적인 클록 주파수는 약 1MHz에서 3.5MHz이다. 마이크 출력은 선택된 클록 에지의 적절한 레벨에 도달하고, 클록 주기의 나머지 반 동안에는 높은 임피던스 상태에 들어간다. 따라서 2개의 디지털 마이크 출력이 하나의 데이터 라인을 공유할 수 있게 된다. L/R 입력은 어느 클록 에지에서 데이터가 유효한지 결정한다.
디지털 마이크 출력은 상대적으로 잡음에 영향을 받지 않지만, 마이크 출력과 SoC 사이의 기생 커패시턴스, 저항 및 인덕턴스로 인한 왜곡 때문에 여전히 신호 무결성이 문제될 수 있다. 임피던스 불일치도 디지털 마이크와 SoC 사이의 거리를 늘려 애플리케이션의 신호가 왜곡되는 반사를 만들 수 있다.
디지털 MEMS 마이크에는 코덱이 필요하지 않지만, 대부분의 경우 펄스 밀도가 변조된 출력은 반드시 단일 비트 PDM 포맷에서 멀티 비트 펄스 코드 변조(PCM) 포맷으로 전환돼야 한다. 많은 코덱과 SoC에는 PDM 데이터를 PCM 포맷으로 전환하는 필터가 있는 PDM 입력이 있다. 마이크로컨트롤러 또한 동기 직렬 인터페이스를 사용하여 디지털 마이크에서PDM 데이터 스트림을 캡처하고 소프트웨어 실행된 필터를 사용한 PCM 포맷으로 전환할 수 있다.
MEMS 마이크 패키지
MEMS 마이크는 중공(Hollow) 패키지로 되어 있는데, 이 패키지는 회로 기판이나 플렉스 회로로 솔더링할 수 있는 패드가 있는 기판과 음향 센서, ASIC이 위치하는 곳에 캐비티를 만드는 리드(Lid)로 구성되어 있다.
대부분의 MEMS 마이크는 MEMS 센서와 인터페이스 ASIC에 별도의 다이를 사용하므로, ASIC을 제작하는 데 일반 CMOS 공정을 사용하면서도 MEMS 공정은 움직이는 구조를 만드는 데 최적화될 수 있다. ASIC이 센서, 기판과 와이어로 연결된 다음, 리드가 그 위에 놓이고 기판까지 봉인된다.
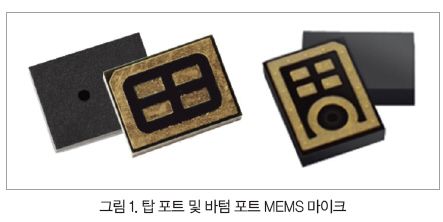
사운드 음향 센서에 닿으려면 MEMS 마이크의 패키지에 구멍이 필요하다. 사운드 인렛(Sound Inlet : 소리 유입통로)은 리드(탑 포트)나 솔더 패드 옆 바닥(바닥 포트)에 있을 수 있다. 사운드가 사운드 인렛에 도달하려면 바닥 포트 마이크의 경우에도 마이크가 놓인 회로기판 내 구멍이 있어야 한다.
탑 포트 마이크를 사용할지 바닥 포트 마이크를 사용할지에 대한 결정은 주로 제품 내 마이크 위치, 제조상의 고려사항 등과 같은 다양한 요인에 의해 결정된다. 지금까지 탑 포트 마이크가 동일한 바닥 포트 마이크에 비해 성능이 떨어졌기 때문에, 성능도 마이크 포트 선택 시 주요한 사안이 된다. 그러나, ST마이크로일렉스트로닉스(이하, ST)의 MP34DT01과 같은 고성능 탑 포트 마이크가 도입됨에 따라 이제는 더 이상 반드시 탑 포트 마이크의 성능이 떨어진다고 볼 수 없게 됐다.
음향 센서의 멤브레인은 MEMS 마이크 내부를 두 섹션으로 나눈다. 사운드 인렛과 센서 멤브레인 사이의 공간은 일반적으로 프론트 챔버라고 하며, 멤브레인의 반대편 섹션은 백 챔버라고 한다(그림 5). 일반적으로 바닥 포트 마이크의 센서는 사운드 인렛 바로 위에 놓이는데, 그로 인해 몇 가지 장점을 갖게 된다.
MEMS 마이크의 감도는 일반적으로 고주파수에서 올라간다. 감도 증가의 원인은 사운드 인렛 내 공기와 마이크의 프론트 챔버 내 공기 사이의 상호작용 때문이다. 이 상호작용은 헬름홀츠(Helmholtz) 공명을 만든다. 이 공명은 병 안으로 바람이 들어갈 때 소리가 나는 것과 동일한 현상이다. 병과 마찬가지로 공기량이 적으면 높은 공진 주파수가 만들어지고, 공기량이 많으면 낮은 공진 주파수가 만들어 진다.
마이크 센서는 대부분의 바닥 포트 마이크에서 사운드 인렛 바로 위에 장착되는데, 그 결과 프론트 챔버는 상대적으로 작아지고 헬름홀츠 공명의 중심 주파수는 높아진다. 헬름홀츠 공명은 일반적으로 오디오 밴드의 상부에 위치하기 때문에 공진 주파수가 올라가면 주파수 응답은 차이가 적고 평탄해진다.
센서를 사운드 인렛 바로 위에 놓아도 백 챔버는 상대적으로 커진다. 백 챔버가 커서 들어가는 공기량이 많아지면, 멤브레인이 음파에 대한 반응으로 움직이기 쉬워진다. 따라서 멤브레인의 감도가 좋아지며 결과적으로 SNR(Signal to Noise Ratio : 신호 대 잡음비)이 높아진다. 또한 백 챔버가 크면 마이크의 저주파수 응답도 개선된다.
탑포트 마이크의 구조는 전통적으로 바닥포트 마이크와 매우 흡사한데, 이는 센서와 인터페이스 IC가 기판에 장착되고, 중공 리드가 그것을 둘러싼 구조로 되어 있기 때문이다. 실질적으로 탑 포트와 바닥 포트 마이크의 유일한 차이는 사운드 인렛이 기판이 아닌 마이크 리드에 위치한다는 점이다. 이러한 마이크의 경우, 사운드 인렛을 리드로 옮기면 프론트 챔버였던 것이 백 챔버로 바뀌거나 그 반대로 된다.
전통적인 탑 포트 MEMS 마이크의 백 챔버 내 공기량이 적은 경우 멤브레인이 움직이기 어려워진다. 이것은 센서의 감도를 떨어뜨리고 SNR을 낮춘다.
또한, 사운드 인렛과 멤브레인 사이의 프론트 챔버 내 공기량이 많은 경우 공진 주파수가 낮아져 마이크의 고주파수 응답이 약해진다.
이렇게 낮은 SNR과 고주파수 및 저주파수 모두에서 빈약한 주파수 응답 결합은, 대부분의 탑 포트 마이크의 성능이 동일한 바닥 포트 마이크의 성능보다 떨어지는 원인이 됐다.
그러나 ST의 MP34DT01 탑 포트 디지털 MEMS 마이크는 이 규칙에서 예외이다. MEMS 센서와 인터페이스 IC를 ST의 독점 패키징 기술로 사운드 인렛 바로 아래 MP34DT01 리드 바닥 쪽에 장착시킬 수 있었기 때문이다(그림 7, 그림 8 참조).
그 결과 프론트 챔버가 작아지고 백 챔버가 커짐에 따라, MP34DT01은 이 마이크의 바닥 포트 버전인 MP34DB01과 같은 수준의 성능을 구현할 수 있게 됐다.
MEMS 마이크의 성능 측정
압력의 SI 단위는 단위 면적당 힘을 선형 측정하는(1Pa=1N/m2) 파스칼(Pa)이다. 그러나, 음압 레벨을 논의할 경우, 낮게는 20μPa(마이크로파스칼)에서 높게는 20Pa 이상의 소리를 감지할 수 있는 사람의 귀가 큰 동적 범위를 갖고 있기 때문에 로그 눈금(Logarithmic Scales)이 더 편리하다. 이러한 이유로, 마이크 성능의 주요 기준은 일반적으로 데시벨(dB)로 표시된다. 0dB SPL은 20μPa과 같고, Pa은 94dB SPL과 같다.
다음 파라미터들은 마이크 성능에서 일반적으로 가장 중요한 지표라고 할 수 있다.
1. SNR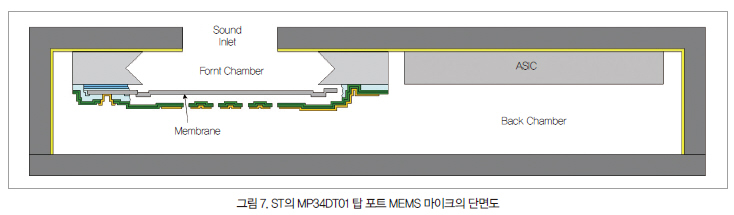
신호 대 잡음비(SNR)는 대부분의 애플리케이션에서 마이크 성능 판단 기준 중 가장 중요한 부분을 차지한다. SNR은 마이크 감도와 잡음 플로어(Noise Floor) 사이의 차이를 의미하며 dB로 표시된다. 현재 MEMS 마이크의 SNR은 약 56dB∼약 66dB이다.
2. 감도
마이크의 감도는 특정 음압 레벨에 대한 마이크의 응답을 측정한 것이다. 일반적으로 감도는 주파수 1kHz, 94dB SPL(1Pa)에서 측정돼 명시된다. 아날로그 마이크의 감도는 1볼트 RMS(dBV) 대비 데시벨로 표시되고, 디지털 마이크의 감도는 마이크의 FSO(Full Scale Output)(dB FS) 대비 데시벨로 표시된다.
3. 잡음 플로어
마이크의 잡음 플로어는 완벽하게 조용한 환경에서 측정되는 마이크 출력의 잡음 양을 의미한다. 센서와 인터페이스 ASIC 모두 마이크 출력에 생기는 잡음에 기여한다. 센서가 기여하는 잡음은 공기 분자들의 임의적인 브라우니언 모션(Brownian Motion) 때문에 생기는 반면, ASIC에서 나오는 잡음은 전치증폭기(Preamplifier) 때문에 생기며, 디지털 마이크의 경우에는 델타-시그마 변조기 때문에 생긴다. 잡음 플로어는 전체 오디오 밴드에 걸쳐 측정되는데, 사람의 귀가 감지하는 대로 잡음 레벨을 보다 정확하게 측정하기 위해 A-가중 필터를 사용한다.
마이크 데이터시트에 잡음 플로어가 항상 표시되는 것은 아니지만, 마이크 감도에서 SNR을 빼면 계산할 수 있으며, 그 결과 값은 dBV나 dB FS로 나타난다. 잡음 플로어는 대부분 94dB SPL에서 감도를 측정한 음압 레벨에서 SNR을 차감함으로써 dB SPL 단위로 동일한 입력 잡음으로 표시할 수 있다.
4. 왜곡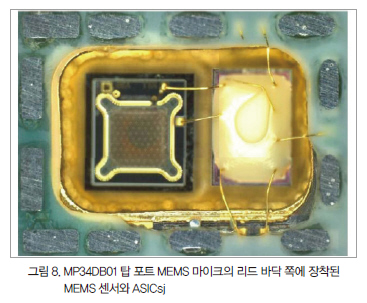
왜곡(THD)은 마이크가 사운드를 얼마나 정확하게 캡처하는지 측정하는 것이다.
보통 사운드 레벨에서의 마이크 오디오 품질을 잘 나타내기 위해, 왜곡은 일반적으로 약 94dB∼100dB SPL 사이로 명시된다.
5. AOP
왜곡은 일반적으로 음압 레벨이 올라가도 음압 레벨이 마이크의 음향 과부하점(Acoustic Overload Point : AOP)에 다다르기 전까지는 크게 늘어나지 않는다. 음향과부하점에 다다르기 시작하면, 왜곡은 급격히 상승하기 시작한다. 마이크의 음향과부하점은 일반적으로 왜곡이 10%로 될 때 음압 레벨로 정의된다.
6. 주파수 응답
MEMS 마이크의 주파수 응답이란, 다양한 주파수에서의 마이크 감도 변화를 의미한다. 마이크의 주파수 응답은 결과를 정상화하기 위해 보통 1kHz에서 0dB로 설정된다. 대부분 MEMS 마이크의 감도는 헬름홀츠 공명 때문에 100Hz 이하에서 떨어지고, 약 4kHz∼6kHz에서 상승하기 시작한다.
이와 같은 이유로 대부분의 MEMS 마이크의 경우 100Hz∼10kHz 사이에서만 주파수 응답을 나타낸다. 그러나, 고성능 MEMS 마이크는 20Hz에서 20kHz까지 전체 오디오 밴드에 걸쳐 상대적으로 평탄한 주파수 응답을 나타낸다.
7. PSR
마이크의 PSR(Power Supply Rejection : 전원 공급 제거)은 마이크의 전력공급 입력 잡음이 출력에 나타나지 못하도록 하는 기능을 측정하는 것이다.
PSR은 GSM 셀룰러 무선 또는 오디오 밴드 전체의 연속 사인파로 만들어진 TDMA 잡음을 시뮬레이션하기 위해 주로 217Hz 구형파(Square Ware)로 명시된다.
MEMS 마이크의 기술 전망
더 좋은 오디오 품질에 대한 기대로 인해 MEMS 마이크의 성능 수준이 점점 높아지고 있다. 많은 제품들이 잡음을 줄이고 마이크 감도를 특정 방향에 집중하기 위해 2개 이상의 마이크 어레이에 디지털 신호 처리 테크닉을 적용하기 시작했다.
1. 높은 SNR
MEMS 마이크의 성능은 계속해서 개선될 것이다. 몇 년 전 55∼58dB이었던 SNR이 현재 63∼66dB로 개선됨에 따라, 오디오 캡처가 더 깨끗해지고 동일한 선명도로 더 먼 거리에서 사용할 수 있게 됐다. 그리고 단어의 정확률을 높이기 위해 자동 언어 인식 알고리즘에도 높은 SNR 레벨이 요구되고 있다.
2. 높은 음압 레벨
시끄러운 환경에서 왜곡되는 것을 막기 위해, 대부분의 마이크 사용자들은 높은 AOP(음향과부하점)도 요구한다.
AOP 이상의 음압 레벨에서 클리핑 때문에 생긴 왜곡은 락 콘서트와 같이 시끄러운 환경에서 녹음된 소리를 사용할 수 없게 한다.
3. 작은 패키지 크기
얇고 가벼운 제품에 대한 소비자 수요가 계속 늘어나면서, MEMS 마이크 패키지의 크기도 줄어들고 있다. 초기 MEMS 마이크의 패키지 크기는 3.76mm×4.72mm×1.25mm였지만, 현재는 3mm×4mm×1mm 및 2.95mm×3.76mm×1mm 패키지가 일반적으로 사용되고 있다. 신형 MEMS 마이크는 2.5mm×3.35mm×0.98mm 및 2.65mm×3.5mm×0.98mm 패키지로 출시되고 있다.
마이크 패키지가 작아지면, 마이크의 백 챔버 크기가 줄어들어 오디오 품질을 유지하거나 개선하는 것이 더욱 어려워지지만, 이와 같은 추세는 지속될 것으로 보인다.
4. 배경 잡음 감소
많은 스마트폰과 태블릿에서 비디오 리코딩과 같은 기능을 구현하기 위해 1개 이상의 마이크를 사용하기 시작했다. 다수의 마이크가 사용되는 다른 일반적인 경우는 배경 잡음 감소 목적으로 사용되는 경우이다.
대부분의 스마트폰은 전화기의 위쪽이나 뒤쪽에 위치한 마이크를 이용하여 주위 환경 잡음을 감지하고, 감지된 잡음을 음성 마이크의 출력에서 빼내 명료도를 높인다. 주 목적이 비디오 리코딩인 마이크는 배경 잡음 감소 목적으로도 자주 사용된다.
5. 빔포밍
빔포밍(Beamforming)을 위해 2개 이상의 마이크 어레이도 사용되고 있다. 빔포밍이란, 마이크 어레이의 출력을 처리해 특정 방향의 감도를 높이면서 동시에 다른 방향의 사운드를 거부하는 것이다. 대부분의 마이크 출력은 전방향이다. 즉, 모든 방향에서 감도가 동일하다. 따라서 대부분의 경우 명료도를 높이기 위해서는, 감도를 특정 방향으로만 집중하고 다른 방향에서는 줄이는 것이 바람직하다.
빔포밍은 다양한 방향에서 들어오는 사운드의 위상 차이를 이용하여 마이크 감도를 특정한 방향으로 집중시킨다. 빔포밍은 사운드가 들어오는 방향을 찾아내는 데 사용될 수도 있다. 뿐만 아니라 거실, 컨퍼런스룸, 자동차 등과 같이 말하는 사람과 마이크가 가깝지 않은 애플리케이션에서 매우 유용하다. 또한 시끄러운 환경에서 스피커폰이나 비디오 컨퍼런싱 할 때도 유용하다.
6. 철저한 감도 제어
잡음 제거, 빔포밍 등과 같은 기능을 수행하는 데 사용되는 성능 알고리즘은 일반적으로 사용되는 마이크의 감도가 동일할 것으로 가정한다. 따라서, 마이크 어레이에서 마이크 간에 감도의 차이가 있으면 알고리즘의 성능이 나빠진다.
이와 같은 이유로 엄격한 감도 매칭을 요구하게 됐다. MEMS 마이크의 감도 오차는 일반적으로 ±3dB이다. 하지만, 엄격한 감도 오차를 기준으로 마이크를 스크리닝하거나 마이크 파라미터의 일반적인 차이를 보상하기 위해 마이크 ASIC을 트리밍함으로써 감도 오차를 ±1dB로 줄일 수 있다.
최근 MEMS 마이크 사용량이 급격하게 늘고 있다. 글로벌 IT 시장조사기관인 HIS는 MEMS 마이크 사용량이 2013년 약 27억 개에서 2017년 약 50억 개로 늘어날 것이라고 전망했다. 태블릿, 스마트폰과 같은 애플리케이션의 성장은 MEMS 마이크의 사용량이 증가되는 주요 원인이라고 볼 수 있다. 비디오 리코딩, 능동 잡음 제거, 빔포밍과 같은 기능을 구현하기 위해 제품에 마이크를 2개 이상 사용하는 경우가 늘어나는 것도 MEMS 마이크의 사용량이 증가하는 요인 중 하나이다.








