TJA와 APS를 비롯한 자율주행 자동차 아이템들이 상용화됨에 따라, ISO TC204에서는 2014년부터 매 정기회의에서 자율주행 자동차 특별 세션을 개최해, 관련 표준을 도출하고 있다. 여기서는 세계적인 자율주행 자동차 상용화 현황과 국제 표준 현장의 진행 상황을 살펴본다.
최근 자율주행 자동차와 관련된 보도가 이어지면서, 자율주행 자동차에 대한 관심도 부쩍 높아졌다. 그러나 자율주행 자동차가 어떤 형태로 도로에 나타날 것인지에 대해서는 일반인뿐 아니라 일부 전문가도 산업계와 동떨어진 이야기를 하는 경우가 있다. 여기서는 우선 자율주행 자동차와 관련된 오해부터 짚어본다.
■오해 ① … 무인 자동차가 자율주행 자동차이다
자율주행 자동차는 자동차가 주변 상황을 스스로 인지 및 판단하며, 자동차를 제어하여 특정 상황에서 운전자의 주행조작을 자동으로 대신하는 시스템이다.
여기서 중요한 것은, 자율주행 자동차는 탑승한 인간을 목적지까지 이동시키는 기능을 갖는다는 것이다. 반면 무인 자동차는 군용 전투로봇과 같이 자동차 형상을 갖추기는 하지만, 탑승자의 주행을 보조하거나 탑승자를 수송하는 것이 핵심 기능은 아니다.
자율주행 자동차는 군용 무인 차량과 달리 탑승자의 안전 및 탑승감이 중요하며, 운전자가 수동주행하는 상황도 대부분 고려해야 하기 때문에 개발 시 고려사항이 매우 상이하다. 그러므로 자율주행 자동차를 무인자동차와 동일하게 생각하는 것은 정확하지 않은 관점이다.
■오해 ② … 자율주행은 먼 미래에 실용화될 기술이다
2013년 BMW는 X8 차종에 TJA(Traffic Jam Assist) 시스템을 탑재해 판매했고, 2014년에는 벤츠와 폭스바겐에서 TJA가 탑재된 차량을 출시했다(그림 1). 또한 부품 업체인 보쉬와 콘티넨탈이 TJA 양산 기술을 확보하고 있으며, 다른 글로벌 부품 업체들도 상용화 단계이므로 실제로 자율주행 자동차가 도로에 나오기 시작한 것은 이미 예전 일이며, 머지 않아 대중적으로 확산될 것이다.

그림 1. TJA를 탑재한 BMW, 벤츠, 폭스바겐의 차량(출처 : 각 사 홈페이지)
TJA는 차가 막히는 시내도로에서 자동으로 앞차와의 거리를 유지하며 차선을 유지하는 시스템으로, 저속 주행 시 앞차와의 차간 거리를 자동으로 제어해 주는 LSF(Low Speed Following)와, 차선을 인식하고 자동으로 조향을 제어하여 차로 내로 차량을 유지시키는 LKAS(Lane Keeping Assistance System)의 조합으로 볼 수 있다.
자율주행 자동차의 상용화 현황
자율주행 자동차 기술 개발은 어느 정도까지 진행됐을까? 현재 우선적으로 상용화되고 있는 자율주행 제품군은 다음과 같은 4종이다.
(1) APS(Automated Parking System)
APS는 운전자가 탑승한 상태 또는 운전자가 차에서 내린 상태로 주차를 명령하면 자동으로 주차해 주는 시스템이며, 이와 유사한 시스템으로 탑승자가 내리면 자동으로 주차장을 찾아서 주차하는 Automated Valet Parking 시스템이 있다.
(2) TJA(Traffic Jam Assist)
가다가 서다가를 반복하는 저속 시내 구간에서 사용하는 자율주행 시스템
(3) Highway Pilot
고속도로에서 사용하는 자율주행 시스템. 기본적으로 ACC와 LKAS가 결합된 제품
(4) Automated Lane Change 시스템
자동으로 차선을 변경시켜 주는 시스템
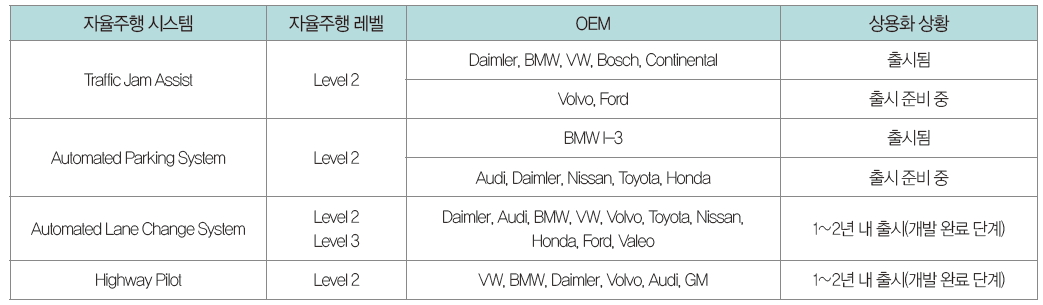
이와 같이 4종류의 자율주행 시스템 상용화 현황은 표 1과 같다. 표에 나타난 바와 같이 TJA와 APS는 이미 출시됐으며, 국내에서도 자동 주차에 대해서는 이미 2015년 서울모터쇼 등에서 상용화 수준의 제품을 선보인 바 있다. 또한 현대자동차는 2016년 제네시스에 TJA를 탑재해 판매할 계획을 공표했다.
표 1. 완성차별 자율주행 자동차 출시 현황(출처 : ISO TC204)
자율주행 레벨
자율주행 자동차의 상용화를 이야기하기 전에, 자율주행 레벨에 대해 간단히 살펴본다. 현재 가장 널리 사용되고 있는 자율주행 레벨은 SAE J3016 표준에서 정의한 5단계 분류이며, 이는 미국의 국가기관인 NHTSA가 정의한 4단계 분류 방식에서 최종 단계인 4단계를 둘로 나눠 세분화한 것이고, ISO에서도 이 5단계 분류법을 기반으로 표준을 논의하고 있다. 자율주행 레벨의 의미는 다음과 같다.
① 0단계 : 운전자가 모든 운전 행동을 시행하는 단계
② 1단계 : 가감속 또는 조향조작 중 한 가지를 시스템이 수행할 수 있는 단계이며, 기타 모든 운전 조작 및 주변 상황 주시는 운전자가 담당
③ 2단계 : 가감속과 조향조작을 동시에 수행할 수 있는 1종류 이상의 시스템을 탑재한 단계이며, 기타 모든 운전 조작 및 주변 상황 주시는 운전자가 담당
④ 3단계 : 특정 모드에서 자율주행 차량이 모든 주행 관련 부분을 담당하지만, 시스템 요청 시 운전자가 바로 운전 조작을 대응할 수 있는 단계
⑤ 4단계 : 특정 모드에서 자율주행 차량이 주행 관련 부분을 모두 담당하며, 시스템이 요청해도 운전자가 운전조작을 대응하지 않아도 되는 단계
⑥ 5단계 : 인간이 운전할 수 있는 모든 주행 상황에서 자율주행 서비스가 제공되는 단계
이 레벨 분류에 따라 고속도로 자율주행 기능을 갖는 Highway Driving Assistance 시스템을 예로 들면, 유사한 기능이지만 다음과 같이 몇 종류의 시스템으로 출시된다.
•레벨 2 시스템 : 운전자가 지속적으로 위험 상황 주시
•레벨 3 시스템 : 수 초의 경고가 발생한 경우, 운전자가 운전 조작 실시
•레벨 4 시스템 : 고속도로 자율주행 시 운전자가 운전 조작을 할 필요가 없음
따라서 우선적으로 상용화될 수 있는 시스템은 운전자가 지속적으로 위험 상황을 주시하면서, 곧바로 제어권을 넘겨받을 준비가 되어 있어야 하는 레벨 2 시스템이라는 것을 알 수 있다.
자동차 산업과 IT 산업 간 헤게모니 경쟁

그림 2. 구글의 자율주행 자동차와 프리우스 기반의 구글카 (출처 : 구글 보도자료)
SAE 분류에서 레벨 2와 레벨 3 이상을 크게 구분하는 이유는 바로 운전자 주시 책임 때문이며, 레벨 2 시스템이 우선적으로 상용화될 수 있는 배경에는 법제도를 크게 변경하지 않고도, PL법(제조물 책임배상)을 고려하지 않고 교통사고 발생 시 시스템이 아닌 운전자의 주시 책임으로 귀결되도록 하는 부분이 있기 때문에 자동차 제조사들이 안심하고 시장에 출시할 수 있다는 점이 크다.
이 부분에서 구글카와 자동차 업체들 간의 접근방식에 큰 차이가 있다. 구글카는 자율주행 자동차(Self-Driving Car)를 포함하고 있다. 또한 그간 개발된 구글카의 형태는, 적어도 홍보상에서는 레벨 4 또는 레벨 5를 목표로 개발되고 있다. 이는 사고 발생 시 법적인 문제를 제조사가 책임지는 위험성을 구글이 감수할 용의가 있다는 것으로 받아들여지며, 이는 자동차 산업계가 받아들이기 매우 어려운 부분이다.
일본 타카타사의 에어백 결함으로 인해 세계 완성차 업체들이 막대한 손실을 입었던 이슈를 예로 들면, 자율주행 자동차의 기능 오류로 인해 사고 발생 시 나타날 수 있는 법적, 사회적 문제는 글로벌 대기업들도 자사의 명운을 걸어야 할 심각한 문제가 될 것이다.
기계에 자신의 생명을 맡기는 자율주행 자체에 대한 근본적인 회의로 인해 시장 형성마저 저해될 수도 있다. 리콜과 차량결함에 의한 역경을 수시로 이겨 내며 성장한 글로벌 완성차들이 구글의 ‘운전자를 완벽하게 대신하는 보기 좋은’ 접근 방식을 현실성 없는 것으로 판단하는 것은 이러한 입장에 근거하고 있다.
보다 실무적인 문제 몇 가지를 살펴보면 현재 자율주행 시스템의 수준을 알 수 있으며, 동시에 구글카의 미래에 대한 자동차 산업계의 부정적인 시각이 이해될 수 있다.
첫 번째 문제는 시험주행 거리이다. 미국의 경우 대략 매 300만 마일마다 1명의 사망사고, 매 6.5만 마일마다 1건의 교통사고가 발생한다.
완전히 새로운 형태의 자동차라고 할 수 있는 구글카(레벨 4 이상의 경우)가 안전성을 입증하려면, 적어도 그의 10배인 3,000만 마일을 누적해야 한다는 것이 자동차 업계의 의견이다. 현재 구글카는 100만 마일 가량을 누적한 것으로 알려져 있다.
두 번째 문제는 유즈케이스에 대한 부분이다. 실제 양산되는 자동차는 10여 년 동안 혹한에서 혹서까지, 밤낮으로 눈과 안개를 맞으며 다양한 차종과 함께 여러 가지 도로 환경에서 주행하므로 이를 고려해 개발된다.
예를 들어 ACC(차간 거리 제어장치) 시스템 개발자는 다양한 도로 환경에서 발생하는 경우의 수를 모두 고려하여 1,000종이 넘는 유즈케이스를 만들고 이를 일일이 고려하면서 실험하고 개발하게 된다.
그렇다면 ACC와 LKAS의 조합을 넘어서는 레벨 4 수준의 자율주행 자동차는 실제 1만 가지가 넘는 유즈케이스를 고려해야 할 것으로 전망하고 있으며, 이를 실행하는 데 필요한 인적, 물적 자원을 IT 업계에서 투입하기에는 어려울 것으로 자동차 업계는 예상하고 있다.
세 번째 문제는 센서의 성능이다. 자동차 업계가 상용화하고 있는 형태는, 고속도로와 같은 특정 주행 상황을 상정하여 장애물의 종류와 주행 환경을 한정하고, 뛰어난 인지능력을 가진 인간을 조력자로 사용하는 레벨 2 시스템을 목표로 한다.
모든 주행 환경에서 완벽하게 자율주행할 수 있는 시스템으로 가기에는 현재의 센서 기술에 상당한 한계가 있다.
예를 들어 노면에 결빙이나 포트홀, 높이가 낮은 노상 낙하물 등이 있을 경우 차량 움직임에 큰 영향을 미칠 수 있지만, 차량용 레이더로 감지하기는 어렵다. 또한 현재의 차량용 비전 센서는 인간의 눈과 비교할 수 없을 정도로 낮은 해상도를 갖고 있다. 따라서 인간을 배제하고 기계에만 의존하려면 센서 기술의 추가적인 발전이 전제되어야 한다.
실제 캘리포니아 주에서 자율주행 자동차 실험 운행 허가를 받은 구글은 특정 차량에 특정 운전자가 지정되는 형태로 허가를 받았으며, 이는 시험 차량들의 자율주행 시스템 수준이 상이하므로 시스템에 대응할 수 있는 자격 있는 직원이 지정된다는 형태이다.
시험주행 시 항상 운전자가 탑승해 주변 상황을 주시하고, 이상이 발생했을 때 운전자가 개입하므로 실제로는 레벨 2, 특정한 경우에만 레벨 3 수준으로 주행한 것으로 간주할 수 있다.
이와 같은 이유로, 자동차 산업계는 구글에서 막대한 자본을 투입한 IT 형태의 접근 방식은 상업화에 실패할 것으로 전망하고 있다. 그러나 IT 산업 특유의 기발한 창의성과 기술력을 고려한다면, 향후 구글이 어떤 방식으로 상용화에 접근할지 지켜보는 것은 흥미로운 일이다.
ITS를 담당하는 ISO TC204
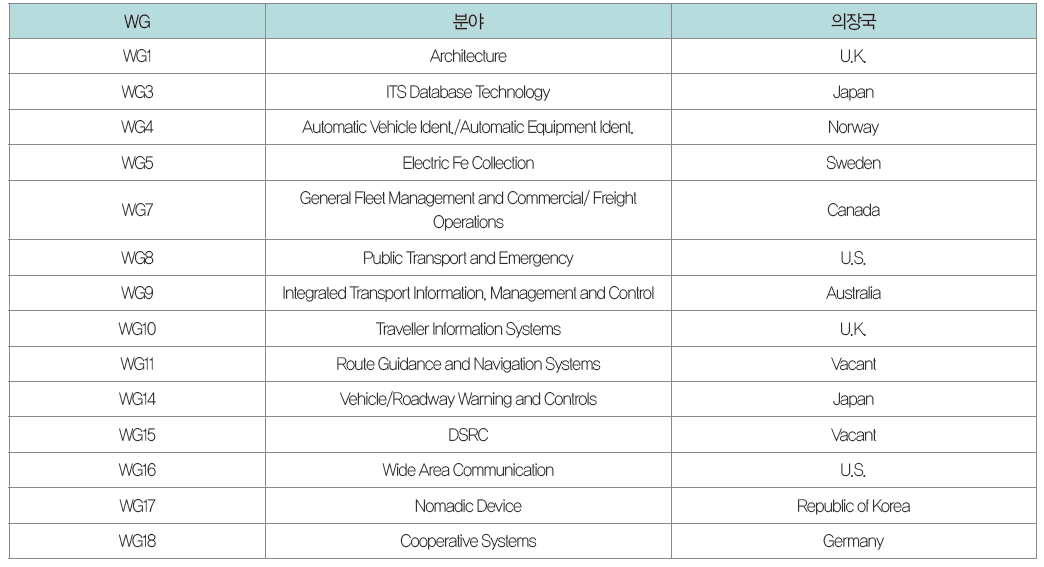
ISO TC204는 ITS를 담당하는 TC로, 1992년에 설립되어 1993년에 활동을 시작했다. 현재 다른 TC와 달리 SC(Sub-Committee) 없이 WG만으로 운영되며, WG1부터 WG18까지로 구성돼 있다. 현재 활동 중인 분과 구성은 표 2와 같다.
표 2. ISO TC204의 WG 구성
TC204 전체 회의는 매년 봄/가을로 2회 개최되고, WG별로 추가 회의를 개최하기도 한다.
P 맴버국(Participating Members ; 투표권을 가진 국가)은 26개국(알제리아, 오스트리아, 호주, 벨기에, 브라질, 캐나다, 중국, 체코, 프랑스, 독일, 헝가리, 인도, 이스라엘, 이탈리아, 일본, 한국, 말레이시아, 네덜란드, 노르웨이, 러시아, 남아프리카공화국, 스페인, 스웨덴, 스위스, 영국, 미국)이며, O 맴버국(Observing Members ; 옵저버 국가)도 26개국이다. 우리나라에서는 매번 25∼30명 규모의 대표단을 파견하고 있다.
TC204에서는 2014년부터 이례적으로 전체 WG 맴버가 참여하도록 하는 자율주행 자동차 세션을 열고 있으며, 이를 통해 자율주행 자동차의 실용화에 필요한 용어, 자동차 시스템, 도로 인프라, 통신 분야의 다양한 표준화 대상을 정하고, 실질적인 담당자를 정하기 위한 활동을 진행 중에 있다. 다음에는 이 중 ADAS와 자율주행에 대한 시스템 표준을 담당하는 WG14에 대해서 알아본다.
ISO TC204 WG14 Vehicle/Roadway Warning and Controls
WG14에서는, ADAS(Advanced Driver Assistance System)와 자율주행에 대한 시스템 표준을 담당하며, 부품 표준은 다루지 않는다. 의장국은 일본이며, 한국, 미국, 일본, 독일, 스웨덴, 영국, 캐나다, 프랑스, 중국, 체코 등 주요 국가에서 전문가를 파견하고 있다.
또한 닛산, 토요타, 혼다, BMW, 벤츠, 르노, 볼보 등 세계 주요 완성차와 보쉬, 히타치, 비전 등 부품업체, 그리고 자동차부품연구원, 교통연구원, JARI, ASHIRA, PATH 등의 연구소가 참여하고 있다.
미국은 빅3 완성차 대신 버클리 대학 소재 연구소인 PATH, 부품업체인 비전에서 전문가가 참여하고 있으며, 일본은 JSAE가 지원하여 주요 완성차들을 참석시키고 있다. 영국과 캐나다 등은 주로 한두 명의 표준화 담당자가 참여하고, 프랑스와 스웨덴은 완성차가 참여하고 있다.
우리나라에서는 자동차부품연구원에서 필자가 한국 대표를 맏고 있으며, 교통연구원과 ITS KOREA가 참여하고 있다. 2015년 봄 항저우 회의부터는 현대자동차에서도 참여하기 시작했다.
우리나라의 경우, ISO FDIS 11067 CSWS와 신규 C-FVBWS에 대한 Work Item Leader 역할은 필자가 수행하고 있으며, ISO 26684 CIWS에 대한 Work Item Leader 역할은 교통연구원에서 수행하고 있다. WG14에서 개발된 표준은 대부분 양산 중이며, 개발 중인 표준도 일부 양산 제품들이다. 주요 아이템들은 다음과 같다.
① 독립형(Stand Alone) 시스템
•ERBA : Extended Range Backing Assist
•LSF : Low Speed Following
•FSRA : Full Speed Range ACC
•FVCWS : Forward Vehicle Collision Warning System
•MALSO : Maneuvering Aid for Low Speed Operation
•CSWS : Curve Speed Warning System
•FVCMS : Forward Vehicle Collision Mitigation System
•PCMS : Pedestrian Collision Mitigation System
② 협조(Cooperative) 시스템
•CIWS : Cooperative Intersection Warning System
•CACC : Cooperative ACC
•C-FVBWS : Cooperative Forward Vehicle Emergency Brake Warning Systems
•C-FCW : Cooperative FVCWS
•C-LCW : Cooperative Lane Change Warning
③ 자율주행
•RoVAS : Report on standardization for vehicle Automated driving systems
•PAPS : Partially Automated Parking Systems
•TJA : Traffic Jam Assist
•HDA : Highway Driving Assistance
•ALCS : Automated Lane Change Systems
그림 3은 현재의 표준화 추진 현황을 나타낸 것이다. ACC 및 LKAS 등 전통적인 ADAS 시스템 표준은 거의 완료 단계이며 PCMS, RBDPS, CACC, C-FVBWS 등 신규 시스템 표준을 중심으로 활발한 표준 제정 활동이 진행되고 있다. 전체적으로 협조(Cooperative) 시스템 표준을 중심으로 표준화 활동이 추진되고 있다.
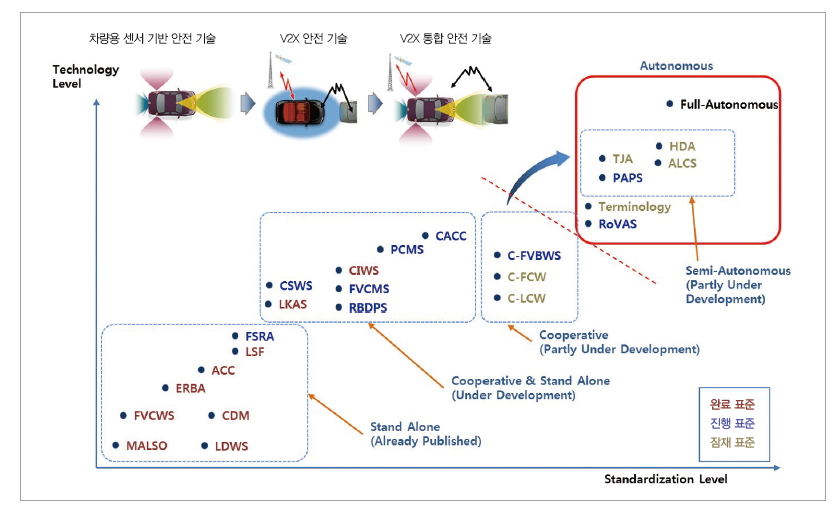
그림 3. ISO TC204 WG14의 ADAS 및 자율주행 관련 표준 추진 현황 (출처 : 자동차부품연구원)
자율주행 자동차의 표준화 추진 방향
WG14를 포함한 ISO TC204의 가장 최근 회의는 2015년 4월 19일부터 24일까지 개최된 항저우 회의였다. 이 회의에서 의장국인 일본은 자율주행 자동차의 상용화가 진행됨에 따라 ISO 표준을 신속히 추진해야 할 필요성을 역설했으며, 우선적으로 4가지 시스템(Traffic Jam Assist, Automated Parking System, Automated Lane Change System, Highway Pilot)에 대한 표준을 제시했다.
그 중 PAPS 표준은 일본이 Work Item Leader 역할을 수행하겠다고 나섰으며, 또한 자율주행 용어 정립을 위한 전문 용어 표준의 필요성 역시 제시했다. 이에 따라, 본격적인 자율주행 자동차 표준이 제정될 예정이며, 각 나라에서도 아이템 선점을 위한 경쟁에 돌입했다.
각 나라의 자율주행 자동차 개발과 WG14의 표준화 추진 로드맵은 그림 4와 같다.
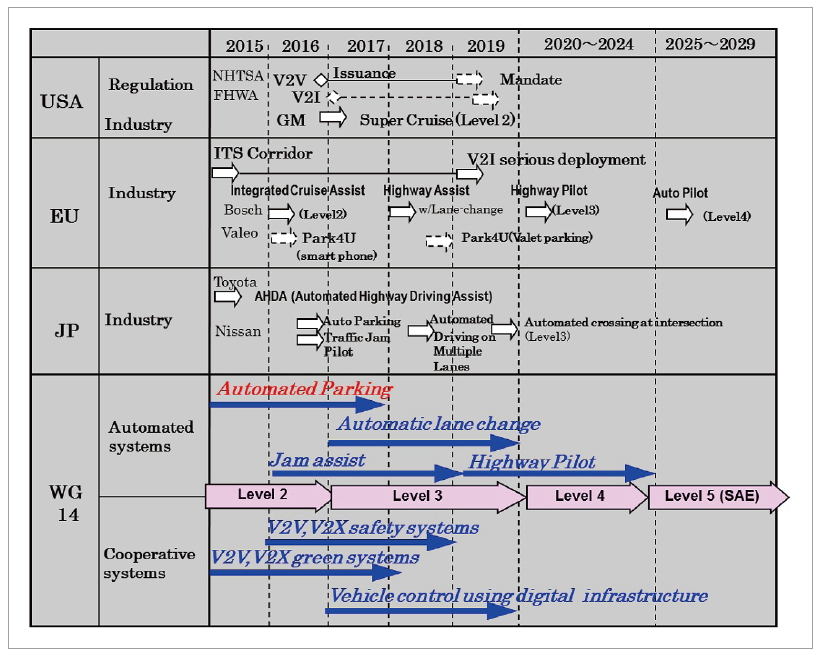
그림 4. 각국의 개발에 따른 표준화 추진 로드맵 (출처 : ISO TC204 WG14)
자율주행 자동차 표준의 전체적인 구성과 내용에 대해서는 이미 2013년부터 WG14에서 RoVAS 표준을 추진하고 있으며, 거의 완료 단계에 들어섰다(Work Item Leader는 일본). 이례적으로 신속히 추진된 이유는, RoVAS가 일반적인 IS 표준이 아닌 TR(Technical Report)이며, WG14 의결만으로 발표하는 아이템이기 때문이다.
자율주행 표준은 용어와 자율주행 레벨에 통일성을 갖춘 상태에서, 각 자율주행 레벨별로 시스템 요건, 운전자와 시스템 간 제어통제권 이양, 기능 이상 시의 요건, V2X 통신 관련 요건, 센서 퓨전 요건, 신뢰성 및 보안 요건, 블랙박스 요건, 시험 규격 및 인증 등 다양한 내용을 포함하며, WG3와 WG18에서 주로 다뤄지는 LDM(Local Dynamic Map) 관련 부분도 포함된다.
우리나라 대응 현황은?
자율주행 자동차가 상용화됨에 따라, 국내에서는 자율주행 자동차 10대 부품 및 5대 서비스 개발을 핵심으로 하는 자율주행 자동차 개발 과제가 기획되고 있으며, 현재 예산 타당성이 심의 중이다.
개발된 자율주행 자동차의 원활한 주행을 위한 도로 인프라 연계 기술 개발 과제가 시작 단계이며, 지난해부터 정부는 범부처 협력을 위한 스마트 자동차 추진단을 발족해 관련 분야의 컨트롤 타워 역할을 수행 중에 있다.
그러나 자동차공학회를 중심으로 산학연 각계에서 노력을 기울이고 있고, 국가기술표준원의 지원으로 2년간 운영되던 스마트카 표준화 코디네이터가 올해 종료됨에 따라, 이 분야의 표준을 지휘할 수 있는 컨트롤 타워는 현재 가동되지 않고 있다.
자동차 산업이 차지하는 국가경제의 비중과 자율주행 자동차가 가져올 사회적 변혁을 고려한다면, 향후 자율주행 관련 아이템의 일부라도 한국이 표준을 주도함으로써 관련 기술을 선도할 필요가 있지만, 현재 우리나라의 표준화 인프라 구도로는 쉽지 않은 상황이다.
다만 TC204 전문위원회와 WG14 참여 맴버들 간에는, 한국이 우선 협조 시스템 중 일부 표준을 주도하고, 국내 여건이 형성됨에 따라 자율주행 아이템 일부에 대한 주도를 고려하는 방향으로 추진 전략을 수립하고 있다. 물론 협조 시스템 추진 시, 국내에서 제안 및 주도하고 있는 In-Vehicle Station Gateway 표준(ISO 13185)과의 연계가 중요하다.
유시복 센터장 _ 자동차부품연구원 자율주행기술연구센터
Copyright ⓒ 첨단 & Hellot.net