
자동차 산업이 100년에 한 번 있는 변혁으로서 자동차의 전동화·지능화에 대응하는 가운데, 닛산자동차에서는 세계 최초로 2010년에 전기자동차(Electric Vehicle: EV 또는 Battery EV, BEV) ‘닛산 리프’을 양산하기 시작했다. 그 후 많은 전기자동차가 BEV 시장에 진출해 경쟁력을 유지하기 위해 차량의 모델 체인지에 맞춰 전동 파워트레인의 성능을 향상시키고 또한 그 제어도 개량·발전시켜 왔다. 2016년에는 BEV의 전동 파워트레인과 구동계를 공용하는 100% 모터 구동 e-POWER를 일본 시장의 ‘닛산 노트’용으로 선보였다. e-POWER는 파워트레인 방식으로서 시리즈 하이브리드로 분류되는데, 다른 하이브리드 시스템과 차별화해 높은 가속 성능과 액셀 조작성을 BEV의 개발로 얻은 전동 파워트레인의 제어를 통해 실현하고 있다. 현재는 BEV를 비롯해 100% 모터 구동 차량이 많이 시장에 투입되고 있는데, 전동 파워트레인 제어의 관점에서 정리된 문헌은 많지 않다. 이 글에서는 닛산자동차의 전동 파워트레인 발전을 사례로 BEV와 e-POWER 모두를 다루어 보고, 특히 양산차에 채용된 전동 파워트레인의 제어에 대해 설명한다. 전동 파
사람의 시각 시스템은 우리가 세상을 이해하기 위한 주요 수단 중 하나이다. 빛이 눈에 들어오고 정보가 시신경을 통해 뇌로 전달되면 뇌가 그 정보를 해석해 ‘이미지를 생성’한다. 그 중 뇌가 관여하고 있는 과정은 특히 복잡하고 난해한데, 이것이 인식과 의사 결정, 그리고 모든 행동의 기반이 된다. 즉, 시각 시스템은 뇌의 구조를 알고 싶어하는 과학자의 주된 목표 중 하나가 된다. 그리고 동시에 시각 시스템은 이미지 정보 처리를 위한 궁극 모델 중 하나이다. 공학자는 시각 시스템을 이해하고 이것을 모방함으로써 기계가 복잡한 문제를 해결한다는 오랜 목표에 대응해 왔다. 양쪽의 대응 목적은 다르지만, 동일한 연구 대상을 다른 형태로 쫓고 있다. 최근 심층 신경망이라는 기술은 이들 양쪽의 합류를 촉진해 각각의 목표를 실현하는 데 공헌하기 시작했다. 심층 신경망은 뇌의 신경세포 네트워크의 일부를 모방해 이미지 인식, 물체 탐지 및 이미지 생성과 같은 시각 과제에 대해 탁월한 성능을 보여주고 있다. 그리고 자율주행차, 의료영상 진단, 비디오 분석, 가상현실, 증강현실, 대규모 언어 모델 등 많은 분야에서 혁신적인 응용이 이루어지고 있다. 그리고 이 놀라운 기술은 뇌의 모

최근 몇 년 동안 TSN(Time-Sensitive Networking)은 학문적 기술에서 현실 세계의 실제 애플리케이션으로 도약하는데 성공했다. 이 혁신적 기술의 이점을 활용하고자 하는 기업들은 관련 업계의 요구사항을 바탕으로 TSN 적용이 가능한 시스템을 구축하기 시작했다. Moxa는 IEEE TSN 작업 그룹이 구성되기 전부터 업계 파트너들과 협력하여 산업화 4.0(Industry 4.0)으로 잘 알려진 제조 분야의 디지털화와 산업 자동화를 위한 모든 핵심 기술을 촉진시키는데 주력해 왔다. TSN은 Moxa가 널리 기여하고 있는 산업 디지털화 애플리케이션의 중요 원동력이기도 하다. 실제로 Moxa는 수많은 업계 이해관계자들과 협력하여 TSN이 적용된 시스템을 구축하고, 실제 애플리케이션 및 여러 기술적 발전을 통해 입증된 TSN의 이점을 공장 현장에 제공하고 있다. 그동안 산업 자동화 애플리케이션은 각기 다른 장비와 인터페이스 및 프로토콜로 인해 적시에 대량의 데이터를 전송, 수신 및 처리하는데 상당한 어려움이 있었다. TSN은 연결된 모든 장치들이 공통의 시간 레퍼런스를 공유하여 특정 작업을 위한 특정 시점에 모든 데이터를 이용할 수 있도록 네트워크상

아나로그로 운용되던 프로세스계장 분야가 바야흐로 미래의 디지털로 향하고 있다. 현장에는 CVVSB 2ㅁ × 2C 아나로그 케이블 대신, 단일 쌍(Single Pair Ethernet/SPE)케이블로 바뀌고, 클라우드가 가능한 디지털이 일상인 시대로 바뀐 것이다. 2019년 9월 IEEE802.3cg(EtherNet/IP=802.3) 태스크 포스가 10BASE-T1S 및 10BASE-T1L 이더넷 표준 개발을 완료한 이후 ODVA는 이러한 이더넷 기술을 자체적으로 채택한 뒤 변화하기 시작했다. 기존의 PLC 자동화 기술은 물론이고 한발 더 나아가 이제 10BASE-T1S 이더넷 기반의 캐비닛 EtherNet/IP 사용 프로파일과 10BASE-T1L 이더넷 기반의 이더넷-APL 프로세스계장 프로파일이 EtherNet/IP 사양에 플러스가 된 것이다. 이 글에서는 잠재적인 EtherNet/IP 사용 프로파일인 On-Machine 센서와 EtherNet/IP 사용 프로파일에 대해 연구한 결과를 해부해 보고자 한다. OMSPE 시스템 아키텍처(물리적 토폴로지, 미디어, 인프라 탭, SPE 센서), 통신아키텍처, 전력 전달아키텍처, 네트워크, 시운전, 진단 기능을 갖춘

신경과학 분야에서는 계측 기술의 급속한 발전으로 신경 활동의 측정 방법과 그에 의해 얻어지는 데이터가 급속하게 진화하고 있다. 전극을 직접 대상 영역에 꽂아 신경세포의 활동을 전기적으로 측정하는 전기생리학적인 측정에서는 동시에 100개 오더(최신 Neuropixels에서는 1,000개 오더)의 세포를, 대상 동물이 과제를 수행하는 동안에 실시간으로 몇 시간 이상 측정할 수 있다. 또한 칼슘 이미징 등의 신경 활동을 광학적인 활동으로 변환해 측정하는 방법이라면, 시간 정도가 떨어지지만 1000개 오더(100000개를 취할 수 있다는 이야기도 있다)의 세포 활동을 며칠에 걸쳐(!) 측정할 수 있게 됐다. 즉, 신경과학 분야에서 연구자는 매우 큰 데이터에서 신경계 정보 처리의 바탕에 있는 원리·기구를 추출해야 하는 과제에 직면해 있다. 이 글에서는 이 대자유도 데이터와 씨름하고 있는 신경과학에서 급속히 발전하고 있는 역학계적 견해·해석 방법을 소개한다. 여기서는 데이터 해석뿐만 아니라 순환 신경망(RNN)을 이용한 데이터 구동형 모델의 접근법이 많이 이용되고 있으며, 이 접근법을 중심으로 설명하고자 한다. 대자유도 데이터로서의 신경 활동 일찍이 2000년대 초반까

인간 대뇌 시각계는 망막에 투영된 모든 정보를 동일하게 처리할 수 없다. 시야 내에서 가장 중요할 것으로 예측되는 물체나 공간 위치를 선택하고, 이를 중점적으로 처리함으로써 실제 환경에 적응한다. 이러한 정보의 취사선택 기능이 주의 선택이다. 최근에는 이 주의 선택은 인공지능 개발에서도 크게 주목받는 기능이다. 생체의 시지각을 실현하는 가장 중요한 기능인 주의 선택은 신경세포(뉴런)의 활동을 기록하는 대뇌생리학적 기법뿐만 아니라, 인간 시지각을 계측하는 심리물리학적 기법 등을 이용해 학제적으로 연구되어 왔다. 또한 주의 선택의 뇌 메커니즘과 특성을 이해하기 위해서는 이들 실험에서 얻은 지식을 통합한 신경회로 모델의 구축과 시뮬레이션이 중요하다. 이러한 신경회로 모델의 응답을 정량적으로 평가하기 위해 자연 이미지에 대한 인간의 시선 데이터가 지표로 활용된다. 최근에는 이들 시선 데이터를 학습 데이터로 활용하는 기계학습적인 기법에 기초한 주의 선택 모델 획득 연구도 활발히 이루어지고 있다. 이 글에서는 시야 이미지에 대한 인간의 주의 선택 특성을 재현하는 계산 모델에 대해 설명한다. 특히 인간의 시지각을 담당하는 대뇌 시각 피질의 신경회로에 기초한 주의 선택 모
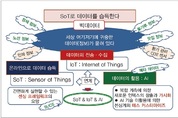
Society 5.0 등 사회 시스템 변혁에 대해 DX화의 요망이 있는 가운데, 필요 정보의 획득·전송·기록에 관련된 기반 기술로서 센싱 기술에 큰 기대가 집중되고 있다. 말할 것도 없이 센싱 기술은 도량형으로 시작되어 현재에 이르기까지 매우 오랜 역사를 가지고 있으며, 사회가 변천함에 따라 새로운 기능을 부가·실현하는 동시에 그 시대의 요청에 대응한 다양한 역할을 수행해 왔다. 제2차 세계대전 후 시작된 제조업의 기기 계측화·자동화 속에서 이른바 오토메이션의 실현에 크게 공헌했지만, 지금 다시 비제조업으로 적용 분야를 확대하는 기운이 높아지고 있어 센싱 기술의 복합 계측화, 예측 기술의 필요성이 논의되는 등 잠재적이지만 다량의 센싱 요구가 있다고 여겨지며 그 표면화가 주목받고 있다. 한편, 새로운 계측 시즈의 출현 등도 있어 그 사회 실장화가 요망되고 있다. 실제로 사회의 DX화에 있어 기반 기술을 담당하고 있으며, 이 글에서는 센싱 기술의 향후 역할과 장래 전망에 대해 개인적인 견해와 함께 설명한다. DX 사회와 빅데이터, 그리고 센싱 기술 이미 알고 있듯이 DX(Digital Transformation)란 스웨덴의 우메오 대학 교수인 에릭 스톨터만(Er

고객 기대치의 변화와 전기차의 부상, 예상치 못한 글로벌 공급망의 혼란으로 자동차 및 제조 업계는 새로운 수준의 서비스와 효율성을 달성해야 한다는 압박을 받고 있다. 이에, 아시아 태평양(APAC) 지역의 기업들은 소비자 행동 변화를 인식하고 앞서 나가기 위해 분주히 혁신하고 있다. 예를 들어, 싱가포르에서는 자율주행 및 전기차 연구 개발 계획을 지속적으로 수립해 왔는데, 주롱(Jurong) 지구에 위치한 ‘현대차 그룹 혁신 센터’가 그 예다. 싱가포르는 전기차 생산을 포함한 새로운 자동차 기술을 개발하기 위해 40여 년 만에 최초의 자동차 조립 공장을 구축했다. 그러나 지속적인 혁신은 난항을 겪을 수 있다. 극도로 복잡한 환경에서 차량을 생산, 운송 및 서비스하고 완벽한 개인 맞춤형 고객 경험을 제공하기 위해서는 보이지 않는 곳에서 많은 공정이 요구되기 때문이다. 디지털 전환으로의 여정에는 많은 어려움이 존재하지만 지금이야 말로 전체 자동차 생태계가 부품, 차량, 재사용 가능한 차량용 수납함 및 심지어 도구의 추적 기능 개선을 위해 무엇을 할 수 있는지 살펴볼 때다. 바코드 솔루션 보완 바코드는 제조 공정에서 여전히 필수적인 요소다. 그러나 오늘날의 기업은

이더넷-APL은 PROCESS 계장표준으로 세계 전문 표준개발기구 4곳과 12개의 국제 자동화 메이커에서 합의하여 IEC/IEEE 등의 국제표준기관에서 공인된 새로 나온 신기술이므로, 자세한 설명과 해설이 필요하고 이 기술의 핵심 요체를 설명하는데 자세한 안내가 필요하므로 ‘이더넷-APL 길라잡이’라는 이름을 붙여 10~12회 정도로 내용을 안내 하고자 작명을 했다. 이번 호는 지난 회에 이어 APL 네트워크의 계획 과정과 APL 토폴로지 계획 기본사항에 대해서 알아본다. APL 네트워크의 계획 과정 1. APL 시스템이 가능한 토폴로지 그림 1은 필드 장치와 필드 스위치의 위치를 보여준다. 첫째, 현장 장치의 위치가 기술 프로세스에 의해 정의된다는 것을 인식해야 한다. 따라서 APL 네트워크를 계획하는 담당자는 배관 및 계측(P&I) 계획에 정의된 필드 장치의 위치를 전제조건으로 고려해야 한다. 계획 단계에서는 다음 조건을 준수하여 필드 스위치를 필드 장치 가까이에 배치해야 한다. · 표 1에 나열된 케이블 범주 IV를 사용할 때 필드 장치와 필드 스위치 사이의 최대 거리는 200m이다. · 장치 수는 포트 예비를 포함하여 스위치의 포트 수(스퍼 포

촉각은 환경과 접촉한 상태에 대한 풍부한 정보를 제공한다. 미지의 환경 속 로봇 애플리케이션에서는 특히 촉각이 중요한 역할을 할 것으로 기대된다. 한편 일률적으로 촉각이라고 해도 다양한 성질의 정보가 포함되어 있어 로봇의 ‘촉각 정보’ 정의는 시각 정보에 비해 애매하다. 또한 촉각은 피부에 분포하는 감각이기 때문에 촉각을 모방한 센서 디바이스(촉각 센서)의 설계는 일반적으로 실장하는 로봇의 형상이나 기능에 따라 다르다. 물체의 파지나 조작을 목적으로 하는 로봇에서 촉각 센서는 주로 엔드 이펙터에 탑재되며, (1) 접촉이나 미끄러짐 발생과 같은 접촉 이벤트 검지, (2) 접촉 위치나 접촉력에 기초한 파지의 안정성 평가, (3) 접촉 위치·힘을 피드백하는 것에 의한 힘 제어, (4) 접촉을 통한 물체 특성의 인식·추정에 이용된다. 즉, 촉각 센서를 탑재한 엔드 이펙터는 목적하는 물리 작업을 하기 위한 반응기인 동시에 촉각 탐색(Tactile exploration)을 하기 위한 프로브이기도 하다. 촉각 센서의 설계나 실장에 있어서는 작업 능력과 지각 능력을 양립시키는 것이 중요하다. 촉각 센서의 검출 방식에는 저항식, 정전용량식, 광학식 등 여러 가지가 있는데,

운동은 젊은이부터 어른까지 신체 능력과 건강을 향상시키고 유지하기 위해 사회의 모든 사람에게 꼭 필요하다. 그러나 근력이 약한 사람이나 운동 능력이 떨어지는 사람은 체력 문제로 인해 운동을 계속적으로 실시하기 어렵고, 신체 능력과 운동 의욕이 서서히 저하될 우려가 있다. 그래서 신체 활동이나 훈련에 대한 동기를 높이기 위한 지원이 시각, 청각, 역각 등 다양한 모달리티를 구사해 이루어지고 있다. 예를 들어 물리 치료와 같은 기존 재활 치료에 로봇 등의 기술이 활용되고 있는데, 사용자의 운동 중에 피드백을 제공함으로써 퍼포먼스뿐만 아니라 만족감, 성공감 등에도 긍정적인 영향을 가져올 수 있다는 것도 알고 있다. 이러한 훈련 지원 기술은 유용하지만, 한편으로는 그러한 지원에서 벗어나 자력으로 훈련하는 것을 어렵게 만들기도 한다. 예를 들어 로봇에 의한 역각적인 지원을 받는 상태의 훈련에 익숙한 사람이 갑자기 그 역각 지원을 받을 수 없게 됐을 때, 운동의 신체적 부하가 증가함으로써 심리적으로 낙담하게 될지도 모른다. 이러한 심리적 낙담이 동기부여를 감소시켜 결과적으로 운동 훈련을 중단하게 된다면 불행할 것이다. 피드백하는 정보를 연구함으로써 운동 지원이 심리면에

세상에는 여러 종류의 다양한 화학제품이 넘쳐나고 있으며, 일상생활에서부터 공업, 농업 등을 널리 지탱하고 있다. 이들 제품은 결코 시험관이나 플라스크에서 만들어지는 것은 아니다. 일정한 품질을 유지하면서 안정적이고 저렴한 비용으로 안전하게 대량 생산하기 위해 화학 플랜트에서 공업 생산되고 있다. 예를 들어, 1913년에 질소와 수소를 원료로 하는 하버-보슈법(Haber-Bosch Process)에 의해 암모니아의 공업 생산이 시작됐다. 화학 플랜트에서 만들어지는 암모니아에 의해 대기 중의 질소가 대량으로 고정화되어 비료가 되는데, 이 생산량은 자연계의 질소 고정량을 웃돈다. 즉, 암모니아의 공업 생산이 없다면 현재와 같은 지구 생태계를 유지하는 것은 도저히 불가능한 상태일 것이다. 이와 같이 화학 플랜트에서 생산되는 화학제품은 비료나 자동차, 가전제품, 의류, 의료품 등에 이용되고 있으며, 우리 생활에 없어서는 안 되는 현재 세계를 지탱하는 중요한 기반이 되고 있다. 화학 플랜트를 적절하게 운전하기 위해서는 플랜트 곳곳에서 유량이나 온도, 압력, 성분 조성 등을 계측하고 감시, 제어하는 것이 필수적이다. 예를 들어 반응기 내에서 적절한 반응이 이루어지게 하기

이더넷-APL은 PROCESS계장표준으로 세계 전문 표준개발기구 4곳과 12개의 국제 자동화 메이커에서 합의하여 IEC/IEEE 등의 국제표준기관에서 공인된 새로 나온 신기술이므로, 자세한 설명과 해설이 필요하고 이 기술의 핵심 요체를 설명하는데 자세한 안내가 필요하므로 ‘이더넷-APL 길라잡이’라는 이름을 붙여 10~12회 정도로 내용을 안내 하고자 작명을 했다. 이번 호는 지난 회에 이어 APL 네트워크의 계획 과정을 소개한다. APL 네트워크의 계획 과정 이 섹션에서는 이더넷 APL 시스템의 계획 과정을 안내한다. 이 장의 대상은 APL 네트워크의 계획 과정에 참여하는 개인이 중요하다. 그림 1은 이 절에서 설명한 APL 계획 프로세스와 주요 계획 단계에 대한 개요이다. 1. 장치의 선택 이 문서는 그림 2에 표시된 APL 샘플 애플리케이션을 사용한다. 응용 프로그램은 서로 다른 위치에 있으며 거리가 더 긴 두 개의 발전소 영역으로 구성되어 있다고 가정해 본다. 각 발전소 영역에서 파이프 내 가스 흐름이 제어되어야 한다. 위치측정기와 유량계가 있는 제어밸브를 사용하여 배관 내 압력을 측정해야 한다. 또한 두 발전소 영역의 장치는 제어 및 측정 작업을 수

오늘날 기업들은 수익성을 높여야 한다는 엄청난 압박을 받고 있으며, 생산성을 향상시키면서 비용을 절감하는 것이 그 무엇보다 중요해졌다. 맥킨지(McKinsey)가 최근에 진행한 연구 결과에 따르면, 생산성이 과거 수준으로 높아질 경우, 2030년에는 미국의 누적 GDP가 무려 10조 달러에 달할 수 있다고 한다. 로봇 프로세스 자동화(RPA) 2.0이 등장하면서, 기술이 이러한 목표 달성을 도울 수 있게 되었다. 인공지능(AI)과 머신러닝이 하나로 결합된, 이 지능적 솔루션은 더 복잡한 작업을 자동화하고, 효율성을 개선하면서 사업의 판도를 바꿔 놓고 있다. 그렇다면 RPA 2.0이란 정확히 무엇이며, 빠르게, 끊임없이 변화하고 있는 오늘날의 사업 환경에서 조직이 생산성과 복원력을 개선하는 데 어떠한 도움이 될까? RPA 2.0이란? 로봇 프로세스 자동화(RPA)는 사업 운영 방식에 큰 변화를 불러왔으며, 시간이 오래 걸리는 반복적인 작업을 자동화하여 운영을 간소화하고 비용을 절감시켜 준다. 그러나 A&D와 의료 같은 업계에서 엄격한 보안 요건의 충족과 효율성의 극대화가 중요해짐에 따라, 더 지능적이고신뢰할 수 있는 프로세스 자동화에 대한 필요성이 더욱

일본에서는 2022년 6월에 무인항공기(드론)에 관한 항공법(1952년 법률 제231호) 등의 일부를 개정하는 법률(2021년 법률 제65호)이 공포됐다. 항공법에서 무인항공기 기체의 안전성을 확인하는 ‘기체 인증·형식 인증’ 제도 및 드론을 조종하는 오퍼레이터의 국가 조종 라이선스 ‘무인항공기 조종자 기능 증명’ 제도 등이 창설되어 무인항공기가 유인 지대 상공에서 보조자 없이 육안 외 비행(제삼자 상공 비행, 이른바 ‘레벨 4 비행’)을 하는 것이 가능해졌다. 이 개정에 의해 형식 인증/기체 인증 제도는 2022년 12월부터 시작됐으며, 기타 관련된 제도나 문서의 발행이 국토교통성 등에 의해 정비됐다. 레벨 4 비행을 위한 제도에는 항공법이나 항공국의 통지 문서(서큘러)만으로는 기체 메이커 측의 증명 활동은 어렵고, 각종 보충 정보가 필요하다. 따라서 항공국 측과 기체 메이커 측 사이를 보완하는 가이드라인이나 절차서 등의 연구개발을 목표로 경제산업성과 국립연구개발법인 신에너지 산업기술 종합개발기구(NEDO)에서는 프로젝트를 실시해 왔다. 2017~2021년도까지 ‘로봇·드론이 활약하는 에너지 절약 사회 실현 프로젝트’(통칭 : DRESS 프로젝트)가 실시되























상호명(명칭) : (주)첨단 | 등록번호 : 서울,자00420 | 등록일자 : 2013년05월15일 | 제호 :헬로티(helloT) | 발행인 : 이종춘 | 편집인 : 김진희 |
본점 : 서울시 마포구 양화로 127, 3층, 지점 : 경기도 파주시 심학산로 10, 3층 | 발행일자 : 2012년 4월1일 | 청소년보호책임자 : 김유활 | 대표이사 : 이준원 | 사업자등록번호 : 118-81-03520 | 전화 : 02-3142-4151 | 팩스 : 02-338-3453 | 통신판매번호 : 제 2013-서울마포-1032호
copyright(c) HelloT all right reserved
UPDATE: 2024년 06월 01일 10시 07분




















