[첨단 헬로티]
독일 울름 응용과학 대학의 서비스 로봇 연구소는 로봇 프로그래밍을 쉽게하기 위한 모듈화 방식의 소프트웨어 프레임워크를 개발하고 있다. 이 개발의 목적은 업체에 상관없이 사용할 수 있는 소프트웨어 컴포넌트를 제공하는 것이다. 예를 들어, 각기 다른 업체에서 내놓은 로봇 그립퍼를 갈아끼워서 플러그-앤-플레이로 새로운 로봇 솔루션을 빠르게 개발할 수 있다. 따라서 울름 대학의 연구팀은 고도로 확장성이 뛰어나고 표준화된 임베디드 컴퓨팅 하드웨어를 필요로 했기 때문에 콩가텍(Congatec) 제품을 선택했다.
오늘날 첨단 로봇은 매우 복잡한 구조로 되어 있으며 다수의 서브시스템으로 이뤄진다. 다수의 축과 구동 장치로 이루어진 머니퓰레이터(Manipulator)라고 하는 것을 사용하며, 그 끝에 Gtipper 시스템이나 측정 장치 같은 것을 장착할 수 있다. 움직임을 제어하고 물체 인식이나 위치 인식을 위해서 센서 시스템을 필요로 한다. 또 사람과 같은 공간에서 작업할 수 있는 자율적인 협업 로봇들이 등장함으로써 더 많은 기능과 빌딩 블록들이 추가되고 있다. 산업용 환경에서 안전한 인간-기계 상호작용이 가능한 이동형 로봇을 예로 들 수 있다. 또한 ‘인더스트리 4.0’ 환경에서는 주변 기계 및 시스템들과 M2M(Machine to Machine) 인터페이스가 필요하다. 이를 통해서 상호 협력적으로 일할 수 있다. 이러한 모든 로봇들이 극히 강력한 소프트웨어 컴포넌트와 고성능 임베디드 시스템을 필요로 한다.

스마트 로봇에 대한 시장 수요
스마트 로봇에 대한 시장 수요는 앞으로 더 빠르게 증가할 것이다. 자율 로봇 시스템 시장은 2023년까지 연평균 성장률 23.7%로 성장할 전망이며, 새로운 시장인 협업 로봇(Cooperative Robotics) 시장은 연간 평균 59%로 두 배나 더 빠르게 성장할 것으로 전망된다. 이처럼 빠르게 성장하는 시장으로 기회를 포착하기 위해서는 시장이 성숙하는 것에 따라서 혁신적인 시스템을 되도록 빠르게 개발하고 출시해야 한다. 그러기 위해서는 개발 일정이 촉박해질 것이다. 특히 OEM, SI업체, 사용자 모두에게 어려운 일이 소프트웨어 개발이다. 자율 로봇만 하더라도 이미 충분히 복잡한데 여기서 더 나아가서 협업 로봇이 되기 위해서는 추가적인 서브 시스템들을 통합해야 한다.
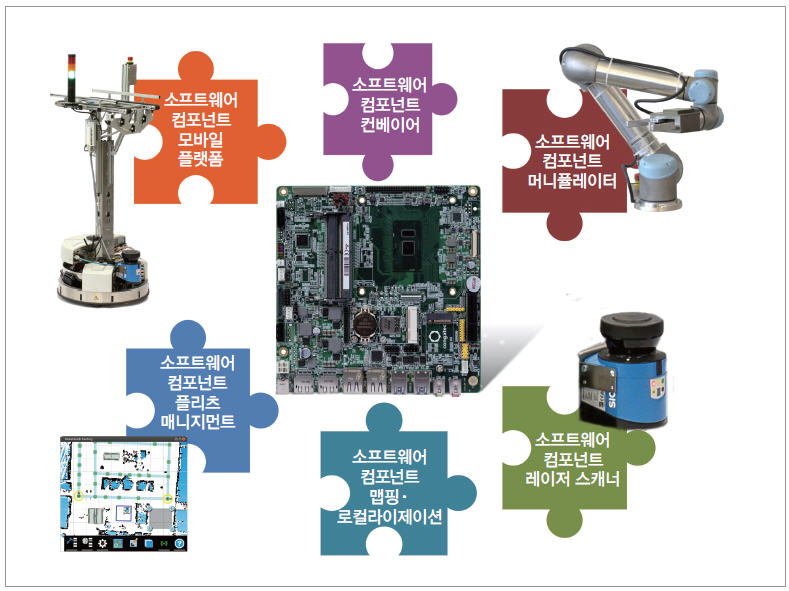
▲ SmartMDSD 툴체인은 컴포넌트 개발자들이 각기 기능에 대해서 소프트웨어 컴포넌트를 개발하면, 이것을 필요에 따라서
조립하고 재사용해서 새로운 로봇 디자인을 개발할 수 있다 .
소프트웨어 개발의 어려움
오늘날 로봇에 사용되는 소프트웨어는 여전히 비공개 시스템으로 구현되며, ASIC이나 FPGA를 비롯해서 각자 필요에 따라서 맞춤화된 x86 또는 Arm 하드웨어를 사용하고 있다. 또 흔히 소프트웨어마저도 각기 로봇으로 맞춤화된 것을 사용함으로써 재사용을 어렵게 한다. 머니퓰레이터(Manipulator) 제어, 내비게이션, 머신비전, 작업 조율, HMI 등과 같은 모든 작업을 하나의 유닛으로 프로그램한다. 그러므로 빈번하게 사용되는 기능들에 대해서 소프트웨어 컴포넌트를 여러 하드웨어 플랫폼에 걸쳐서 재사용한다는 것이 거의 불가능하다. 그렇기 때문에 매번 새로운 디자인을 할 때마다 로봇 소프트웨어를 다시 개발해야만 했다. 그러므로 개발자가 매번 로봇을 새로 프로그램하기 위해서 일이 많아지는 것은 당연했고, 그만큼 실수를 저지르기 쉽고 시간도 많이 소요됐으며, 출시 일정을 지연시켰다.
모듈화로 재사용 가능
독일 울름 응용과학 대학의 서비스 로봇 연구소에서 슐레겔(Schlegel) 교수가 이끌고 있는 연구팀은, SI업체 및 사용자가 매번 새로운 소프트웨어 프로젝트에 착수해야 했던 이러한 비공개 시스템 접근법에서 모듈화 소프트웨어 접근법으로 전환했다. 이것은 복잡한 전체 로봇 시스템을 다수의 개별 기능 유닛들로 나누고 그 다음 단계에서는 완벽하게 정의된 인터페이스를 통해서 각기 유닛들 사이의 상호작용을 구축하는 것이다. 이러한 방식을 스마트소프트(SmartSoft)라고 하며, 이와 관련해서 산학 협력으로 범유럽(EU H2020 프로젝트 “RobMoSys - 로봇 시스템 용의 조립 가능한 모델 및 소프트웨어”) 및 국가(BMWi PAiCE 프로젝트 “SeRoNet - 서비스 로봇 솔루션 공통 개발을 위한 플랫폼”) 차원의 연구들이 진행돼 왔다.
이러한 연구의 취지는 완벽하게 개발되고 테스트를 거친 모듈화 소프트웨어 빌딩 블록을 사용해서 로봇 시스템을 조립하듯 개발할 수 있게 하려는 것이다. 이렇게 하면 소프트웨어 개발자들이 주로 사용되는 기능들에 대해서는 신경 쓸 필요 없이 각자 고유의 기능 모듈에 좀더 전념할 수 있다. 또 중요한 점은, 머니퓰레이터 제어를 위한 로직이든 또는 협업 기능이든 서로 다른 업체들 간에 기능을 조합할 수 있다는 것이다. 그러면 시스템 통합회사나 최종 사용자가 각자 필요에 맞게 개발하기 위해서 시간과 노력을 크게 줄일 수 있으며, 이것은 또 로봇의 도입을 가속화하는 데도 기여할 것이다.
예를 들어서 A 회사의 머니퓰레이터와 B 회사의 새시와 C 회사의 스테레오 머신 비전 시스템을 결합한다고 하자. 이럴 경우에 이미 개발돼 있는 소프트웨어 컴포넌트를 사용함으로써 운반 애플리케이션에 사용하기 위한 제어 소프트웨어를 손쉽게 조립할 수 있다. 이러한 소프트웨어 컴포넌트의 높은 추상화 수준을 활용함으로써 최소한의 조정만 하면 된다. 이것은 단지 미래의 꿈같은 이야기가 아니고, 이미 실제로 시험 중이다.
울름 대학의 이 연구 팀은 이미 ‘래리(Larry)’와 ‘로보티노(Robotino)’라고 하는 서비스 로봇 듀오를 개발했다. 이들 로봇은 Transpharm Logistik의 의약품 운반 애플리케이션을 사용해자율적으로 각기 트레이에서 의약품 패키지를 집어 들고 이것을 지정된 장소로 운반하도록 구성됐다.
또 다른 구성에서는, 두 로봇이 자율적으로 커피 주문을 받고 손님의 테이블로 갖다 주도록 구현했다. 이처럼 이미 개발돼 있고 자유롭게 조합이 가능한 소프트웨어 컴포넌트를 사용함으로써 로봇의 디자인을 변경하는 데 수 시간 밖에 걸리지 않아 개발 기간을 단축할 수 있다.
명확하게 정의된 인터페이스
거의 어떤 조합이든 가능하도록, 이 연구팀은 각기 기능용의 컴포넌트들을 사용한 소프트웨어 모델과 이클립스(Eclipse) 개발 환경용의 모델 지향적 오픈소스 소프트웨어 툴체인을 개발했다. 이 환경은 개발자들을 위해서 각각의 기능에 대해서 고유의 코드를 빌드하고 그런 다음 자동으로 컴포넌트 컨테이너를 생성해서 알고리즘을 보호할 수 있는 툴들을 제공한다. 이러한 컨테이너는 공통의 통신 인터페이스를 통해서 다른 컨테이너와 통신할 수 있다.
또한 컨테이너를 사용해서 이렇게 감쌈으로써 컴포넌트 개발자의 IP를 보호할 수 있다. 이 연구 팀은 이미 다수의 이러한 기능 모듈을 개발하고 이것을 고유의 프로젝트 개발에 사용할 수 있도록 제공하고 있다. 내비게이션 모듈, 머신 비전, HMI, 머니퓰레이터 제어, 작업 조율은 이 목록의 일부에 불과하다. SmartSoft는 단일화된 통신 인터페이스로서 OPC UA를 사용한다. 그러므로 개발자들은 각자 필요에 따른 고유의 기능을 개발하는 데 좀 더 전념할 수 있다.

▲ 콩가텍의 conga-IC175 Mini-ITX 캐리어 보드를 채택한 자율 피킹(Picking 물체를 집고 꺼내는 일) 로봇 Larry. 높은 컴퓨팅
성능, 적은 열 발생, 소형 폼팩터, 높은 신뢰성이 중요한 요구사항이다.
표준화된 임베디드 하드웨어 채택
이 연구팀은 로직 하드웨어에 x86 기술을 사용함으로써 소프트웨어 개발을 특정한 하드웨어에 구속되지 않도록 한다. 이로 인해 적절한 Glue 로직을 사용해서 구현하기가 매우 쉬울 뿐만 아니라 막판에 가서 시스템을 업그레이드하는 것 또한 손쉽게 할 수 있다.
이러한 용도로는 임베디드 x86 하드웨어가 특히 더 적합하다. 표준화가 잘 되어 있고 포괄적인 도큐멘테이션이 제공되기 때문이다. 폼팩터뿐만 아니라 애플리케이션 프로그래밍 인터페이스에 있어서도 표준화가 잘 되어 있다. 따라서 보드가 PICMG의 eAPI 표준이나 SGET의 UIC 표준을 충족하기만 한다면 하드웨어를 손쉽게 교체할 수 있다. 더 나아가서 애플리케이션의 필요에 따라서 마더보드와 ‘컴퓨터 온 모듈(COM)’ 같이 서로 다른 폼팩터 간에도 자유롭게 변경할 수 있다. 콩가텍은 이러한 표준화 및 도큐멘테이션뿐 아니라 하드웨어 통합을 손쉽게 하는 것을 무엇보다 중요시하고 있다.
마티아스 루츠(Matthias Lutz) 울름 응용 과학 대학 박사는 “최대의 컴퓨팅 성능, 에너지 효율, 신뢰성은 기본적으로 중요한 것이며, 이와 함께 표준화와 상호운용성이 중요한 요소로 꼽힌다. 소프트웨어를 추가적으로 추상화하기 위해서는 추가적인 컴퓨팅 성능을 필요로 한다. 이를 위해 현재 우리는 강력한 듀얼 코어 기술을 사용하고 있는데, 보드와 로봇 모듈을 제어하기 위한 GPIO를 표준화함으로써 임베디드 컴퓨팅 차원에서 독립성을 이루기 위한 추상화를 제공한다”고 말했다.
그러기 위해서 선택된 것이 산업용 Mini-ITX 캐리어 보드인 conga-IC175이다. 이 제품은 표준화된 Mini-ITX 폼팩터이므로 이와 같은 혁신적인 소프트웨어 컴포넌트를 사용해서 프로토타입을 개발하고자 할 때 많은 이점들을 제공한다. 이 보드는 표준화된 보드로 모든 인터페이스를 포함하고 있다. 표준적인 ATX 전원, 산업용 12V 입력, 스마트 배터리를 통해서 전원 공급을 할 수 있다(Robotino와 Larry 같은 이동형 로봇은 배터리를 사용해서 동작한다). 또한 PCIe 확장 카드를 통해서 쉽고 빠르게 확장을 할 수 있다. 이 보드는 에너지 효율이 매우 우수하고 견고한 임베디드 부품들을 사용하므로 비싼 냉각이 필요 없이 작동할 수 있다.
나중에 상용화 로봇 디자인에는 ‘컴퓨터 온 모듈’을 사용할 계획이다. 하지만 Mini-ITX 마더보드이든, 표준 Mini-ITX 캐리어 보드를 사용한 모듈이든, 맞춤화된 캐리어 보드를 사용한 모듈이든, 완전 커스텀 디자인이든 상관없이, OEM들에게 중요한 것은 총 유지비용(TCO)이다. 또한 모듈화 소프트웨어를 사용하면 하드웨어가 소프트웨어를 지원하느냐에 따라서 영향을 받는다. 나중에 더 많은 기능을 쉽게 통합하기 위해서 실시간 하이퍼바이저(Hypervisor) 기술에 대한 포괄적인 지원이 이루어진다면 부가적인 이점들이 있을 수 있다. 사용자가 전문적인 하드웨어 플랫폼을 사용할 필요 없이 고유의 IoT 게이트웨이 같은 추가적인 기능을 통합할 수 있다. 따라서 하드웨어 비용을 절감할 수 있다.
루츠는 “이러한 모듈화 접근법은 우리가 개발하는 소프트웨어의 모듈화 접근법과 잘 맞기 때문에 확실히 더 유리하다. 또 한 가지 주목할 점은, 콩가텍이 Real-Time Systems를 인수함으로써 이러한 로봇에 필요로 하는 하이퍼바이저 기술과 자동화 전문가들을 직접 보유할 수 있게 됐다는 것”이라고 말했다.
또한 콩가텍은 기술 솔루션 센터(TSC)를 통해서 모든 OEM 서비스들을 통합적으로 제공하므로, 울름 응용 과학 대학의 서비스 로봇 연구소나 Transpharm Logistik 같은 사용자를 위해서 완벽한 지원을 제공한다.
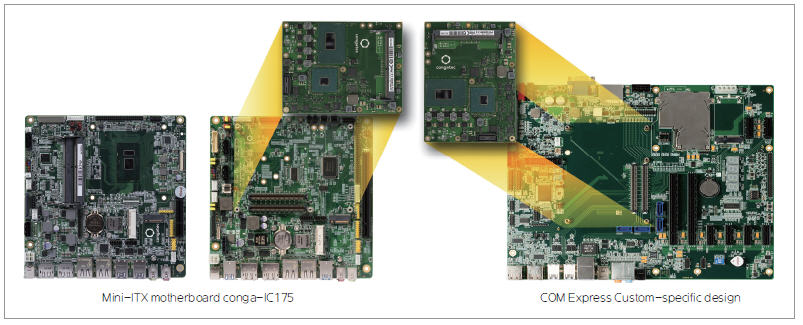
▲ 콩가텍의 스마트 로봇 용의 임베디드 컴퓨팅 하드웨어가 어떻게 진화했는지 보여준다. 디자인 요구와 Lot 크기에 따라서
임베디드 Mini-ITX 마더보드를 선택하거나(1), 표준화된 캐리어 보드(Mini-ITX)를 사용한 “컴퓨터 온 모듈(COM)”을 선택하거나
(2), 맞춤화된 캐리어 보드를 사용한 “컴퓨터 온 모듈 (COM)”을 선택하거나(3), 완전 커스텀 디자인을 선택할 수 있다(4).
Transpharm Logistik에서 시험 중인 운반 애플리케이션
콩가텍의 고객사인 Transpharm Logistik에서 운반 애플리케이션으로 서로 다른 이종 로봇들이 피킹(Picking 물체를 집고 꺼내는 일) 작업을 하고 있다.
자율 피킹 로봇인 Larry는 UR5 머니퓰레이터 모듈을 채택하고 Segway 새시를 사용하고 있다. 운반 로봇인 Robotino는 머니퓰레이터가 아니라 컨베이어 벨트를 사용해서 물건을 지정된 장소로 운반한다. 창고 관리 시스템으로부터 WLAN을 통해서 직접 명령을 수신한다. 이 애플리케이션은 BMBF 프로젝트인 ‘LogiRob - 인간-기계 공유 작업공간에서 다중 로봇 운반 시스템’과 ‘ZAFH 운반 - 운반 유연성을 높이기 위한 협업 시스템(바덴뷔르템베르크주, EU ERDF 2014-2020)’의 연구 결과를 토대로 하고 있다.
글: 젤리코 론카리치(Zeljko Loncaric) 콩가텍(Congatec)마케팅 엔지니어
크리스티안 슐레겔(Christian Schlegel) 독일 울름 응용과학 대학의 서비스 로봇 연구소 박사