




[헬로티]
머신비전의 주요 구성 부품은 조명, 렌즈, 이미지 센서, 비전 프로세싱, 통신 등이 있다(그림 1). 조명은 검사되는 부품을 비추어 특성이 잘 보이도록 함으로써 카메라로 명확하게 볼 수 있도록 해준다. 렌즈는 이미지를 캡처하고, 빛의 형태로 센서에 이를 제공한다.
머신비전 카메라의 센서는 이 빛을 디지털 이미지로 전환한 다음, 분석을 위해 프로세서로 보낸다. 비전 프로세싱은 이미지를 리뷰하고, 원하는 정보를 추출하고, 필요한 검사를 실행하고, 판단하는 알고리즘으로 구성된다. 마지막으로 통신의 경우, 보통 정보를 기록하고 이를 사용하는 디바이스에 직렬로 전송되는 데이터나 개별 I/O 신호를 통해 이뤄진다. 코그넥스 사례로 자세히 살핀다.
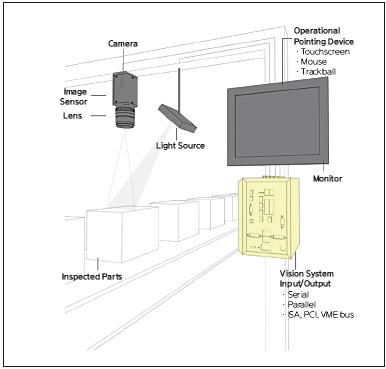
▲ 그림 1. 머신비전 시스템의 주요 구성부품
조명 모듈이나 센서, 프로세서와 같은 대부분의 머신비전 하드웨어 구성부품은 COTS(Commercial Off-The-Shelf)로 이용 가능하다. 머신비전 시스템은 COTS로 조립되거나 모든 컴포넌트가 하나의 기기에 통합된 시스템 형태로도 구매할 수 있다. 여기에서는 다양한 머신비전 시스템의 핵심 구성부품에 대해 살펴본다.
조명
조명은 성공적인 머신비전 결과를 얻기 위한 핵심 요소이다. 머신비전 시스템은 객체 자체를 분석하는 것이 아니라 객체로부터 반사된 빛을 분석함으로써 이미지를 생성한다.
조명 기법은 부품이나 카메라와 연관된 배치방법 및 조명원 등과 관련이 있다. 특수 조명 기법은 일부 특성이 불분명한 이미지를 개선하거나 표면이 모호한 부품의 윤곽을 선명하게 만듦으로써 가장자리 등을 상세하게 측정할 수 있도록 향상시킬 수 있다.
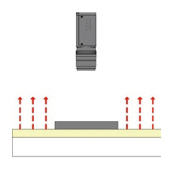
후면광
후면광(Back lighting)은 외양 및 가장자리 측정만을 필요로 하는 애플리케이션을 위해 객체의 윤곽을 향상시킨다. 후면광은 모양을 검출하는 데 유용하며, 보다 안정적으로 치수 측정이 가능하도록 해준다.
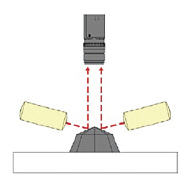
축방향 확산 조명
축방향 확산 조명은 측면에서(공통 축으로) 광학 경로에 조명을 연결한다. 반투명 거울이 측면에서 비춘 조명은 아래의 부품 쪽으로 비치며, 부품은 반투명 거울을 통해 다시 이 빛을 카메라로 반사시킨다. 이 경우 조명을 매우 고르게 비출 수 있고, 균일한 이미지를 얻을 수 있다.

구조형 조명
구조형 조명(Structured Light)은 객체 상의 지정된 각도로 조명 패턴(플레인, 그리드 또는 더욱 복잡한 형태)을 투사한다. 이는 명암과 상관없는 표면 검사에 매우 유용하며, 치수 정보를 취득하고, 부피를 계산할 수 있다.
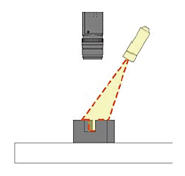
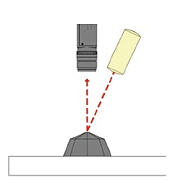
암시야 조명
지향성 조명(Directional Lighting)은 보다 쉽게 표면의 결함을 확인할 수 있으며, 암시야(Dark-Field) 및 명시야(Bright-Field) 조명이 있다. 암시야 조명은 일반적으로 저대비 애플리케이션에 적합하다. 암시야 조명에서 반사 조명은 카메라에서 멀리까지 반사되며, 확산 조명은 표면 텍스처나 고도 변화를 카메라에 반사시킨다.
명시야 조명
명시야 조명은 고대비 애플리케이션에 이상적이다. 하지만 고압 나트륨이나 석영 할로겐과 같은 고지향성 조명원은 윤곽이 선명한 그림자를 만들 수 있고, 일반적으로 시야각 전반에 일관된 조명을 제공할 수 없다. 따라서 반짝이거나 반사성이 있는 표면상의 핫 스팟 및 거울 반사로 인해 명시야에 고른 조명을 제공할 수 있는 확산 조명이 더 요구될 수 있다.
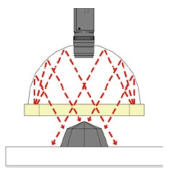
확산 돔 조명
확산 돔 조명(Diffused Dome Lighting)은 관심 특성에 대해 가장 균일한 조명을 제공할 수 있으며, 관심 대상이 아닌 부분은 변칙적으로 가려지거나 화면에 혼선을 줄 수 있다.
스트로브 조명
스트로브 조명(Strobe Lighting)은 심사를 위해 움직이는 객체를 고정시켜야 하는 고속 애플리케이션에 이용된다. 또한, 스트로브 조명은 흔들림을 방지할 수 있다.
렌즈
렌즈는 이미지를 캡처하고, 이를 카메라의 이미지 센서로 보낸다. 렌즈는 광학품질 및 가격에 따라 다양하며, 캡처할 이미지의 품질 및 해상도에 따라 결정된다.
대부분의 비전 시스템 카메라는 교체 가능한 렌즈와 고정형 렌즈, 2가지 종류의 메인 렌즈를 제공한다. 교체 가능한 렌즈는 보통 C-탑재형 또는 CS-탑재형이다. 적절한 렌즈와 확장옵션의 조합으로 최상의 이미지를 취득할 수 있다.
독립형 비전 시스템의 한 부분으로 제공되는 고정형 렌즈는 보통 자동초점 기능을 사용하며, 보통 기계적으로 조정하는 렌즈나 자동으로 부품에 초점을 맞출 수 있는 리퀴드 렌즈가 적용된다. 자동초점 렌즈는 항상 정해진 거리에서 고정된 시야각을 가지고 있다.
이미지 센서
검사할 객체에 올바르게 조사된 이미지를 캡처하기 위한 카메라의 기능은 렌즈뿐만 아니라, 카메라 내부의 이미지 센서에 의해서도 좌우된다. 이미지 센서는 빛(광자)을 전기적 신호(전자)로 변환하기 위해 보통 CCD(Charge Coupled Device) 또는 CMOS(Complementary Metal Oxide Semiconductor) 기술을 사용한다. 기본적으로 이미지 센서의 역할은 빛을 캡처하고, 이를 노이즈나 감도, 동적 범위에 대한 균형을 맞춰 디지털 이미지로 변환하는 것이다.
이미지는 픽셀의 집합이다. 낮은 조도의 빛은 어두운 픽셀을 만들고, 밝은 빛은 보다 밝은 픽셀을 만든다. 따라서 카메라가 애플리케이션을 위한 적절한 센서 해상도를 갖추는 것이 중요하다. 높은 해상도는 보다 세밀한 이미지를 얻을 수 있고, 보다 정확한 측정이 가능하다. 부품의 크기, 검사 공차, 다른 파라미터들도 필요한 해상도를 결정하는 요인들이다.
비전 프로세싱
프로세싱은 디지털 이미지에서 정보를 추출하는 메커니즘이며, 외부의 PC 기반 시스템이나 내부의 독립형 비전 시스템으로 수행될 수 있다. 프로세싱은 소프트웨어로 처리되며, 여러 단계로 이뤄진다.
먼저 센서에서 이미지를 취득한다. 일부 경우에는 이미지를 최적화하고, 필요한 모든 특성을 명확히 하기 위해 사전 프로세싱이 필요할 수 있다. 그런 다음, 소프트웨어는 특정 특성의 위치를 확인하고, 측정을 수행하며, 이를 사양과 비교한다. 마지막으로 결정을 내리게 되며, 결과는 통신으로 전송된다.
머신 비전 시스템의 대부분의 물리적인 구성부품들(조명과 같은)은 비교 사양을 제공하는데, 비전 시스템 알고리즘은 이를 구별하고, 솔루션을 비교할 때 이를 평가하여 핵심 구성부품들이 최고 사양을 유지하도록 해준다. 특정 시스템이나 애플리케이션에 따라, 비전 소프트웨어는 카메라 파라미터를 설정하고, 합격-불합격을 판정하고, 공장의 네트워크와 통신하며, HMI 개발을 지원한다.
통신
비전 시스템은 종종 다양한 상용 컴포넌트를 이용하기 때문에, 이러한 아이템들은 다른 머신 요소들과 빠르고, 쉽게 통합되고 연결될 수 있어야 한다. 일반적으로 이는 정보를 기록하고 이를 사용하는 디바이스에 직렬연결로 전송되는 데이터나 개별 I/O 신호를 통해 수행된다. 개별 I/O들은 PLC(Pro-grammable Logic Controller)와 연결될 수 있으며, 작업 셀이나 스택 조명과 같은 지시계, 또는 불합격 메커니즘을 트리거하는 데 사용되는 솔레노이드를 직접 제어하기 위해 이러한 정보를 사용한다.
직렬연결을 통한 데이터 통신은 기존의 RS-232 직렬 출력이나 이더넷으로도 구성 가능하다. 일부 시스템은 편리하게 모니터링 및 제어를 처리할 수 있도록 애플리케이션에 특화된 다른 오퍼레이터 인터페이스나 모니터와 같은 기기와 연결할 수 있는 Ethernet/IP와 같은 상위-레벨의 산업용 프로토콜을 지원한다.
정리 : 임근난 기자 (fa@hellot.net)








































