



[자율 주행 기술 1] 센서 융합 기반 정밀 측위 시스템과 자율 주행 기술
[자율 주행 기술 2] 산업통상자원부 센서 융합 기반 정밀 측위 과제
산업통상자원부 센서 융합 기반 정밀 측위 과제
저자들은 현재 산업통상자원부의 지원을 받아 ‘GPS-DR, 영상 및 도로 정보를 융합한 횡방향 정밀도 20cm 이내의 저가형 측위 시스템 개발’이라는 센서 융합 기반 정밀 측위 과제를 수행하고 있다. 그림 5는 개발 중인 시스템의 구성도와 각 부분을 맡고 있는 기관을 보여준다.
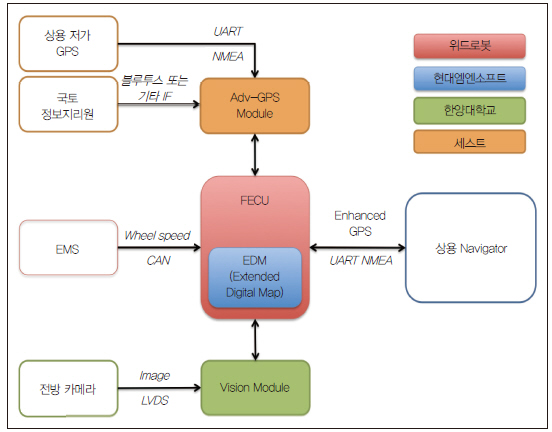
그림 5. 센서 융합 기반 정밀 측위 과제의 시스템 및 팀 구성도(과제명: GPS-DR, 영상 및 도로 정보를 융합한 횡방향 정밀도 20cm 이내의 저가형 측위 시스템 개발)
정밀 지도 생성은 현대엠엔소프트가, GPS 기반 전파항법은 세스트가, 카메라 기반 차로 표시 인식은 한양대학교가, IMU 기반 관성항법 및 센서 융합 측위 부분은 주관기관인 위드로봇이 맡고 있다. 해당 기술을 상용화할 경우, 지도와 카메라 모듈을 제외한 추가 비용을 20달러 이하로 예상하고 있다.
개발 중인 시스템은 기본적으로 GPS 기반 전파항법과 IMU 기반 관성항법의 결과를 기반으로 차량의 위치를 추적하며, 전파 수신 상황에 따른 GPS의 오차와 시간에 따라 증가하는 IMU의 누적 오차를 카메라 기반으로 인식된 노면표시와 정밀 지도에 입력되어 있는 노면표시를 정합하여 해소해주는 방식으로 동작한다.
그림 6은 개발 중인 시스템에서 사용하고 있는 지도를 보여준다.
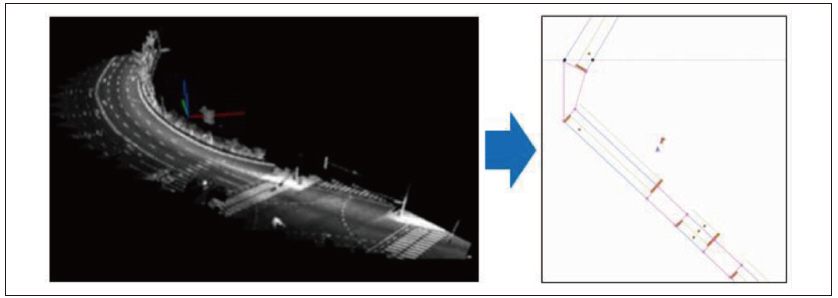
그림 6. 정밀 지도 생성
좌측은 MMS(Mobile Mapping System) 장비를 사용하여 획득한 3차원 점들로 구성된 초기 지도이고, 이로부터 수동으로 차로 표시, 노면 표시 등의 다양한 특징들을 추출하여 우측과 같은 축약된 형태의 정밀 지도를 생성한다.
이 지도는 차로의 노드 및 링크, 횡단보도, 방향 표시, 정지선 등의 다양한 정보를 담고 있다. 그림 7은 전방 카메라를 사용하여 차로 및 노면 표시 인식을 수행한 결과를 보여준다.

그림 7. 차로 및 노면 표시 인식 결과
이 과제에서는 차선, 정지선, 횡단보도 예고 표시, 8가지 화살표의 위치와 유형을 인식하여 측위에 사용한다.
그림 8은 개발 중인 시스템의 측위 결과를 보여준다.
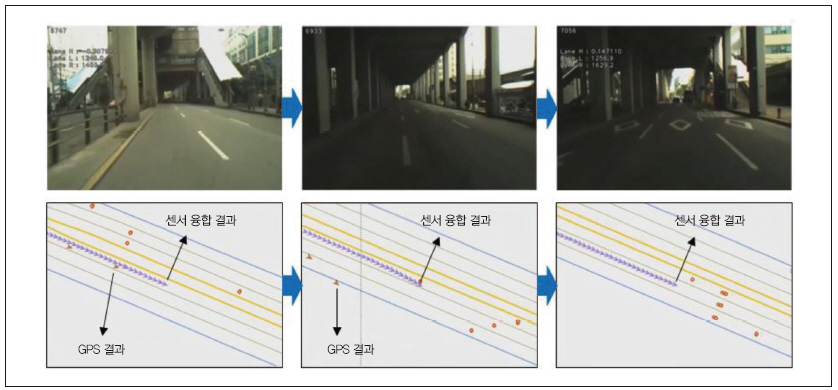
그림 8. 개발 중인 센서 융합 기반 정밀 측위 시스템의 결과
해당 예제는 차량이 고가 아래를 지나가는 상황이다. 상단은 전방 카메라 영상을, 하단은 지도상의 자차 위치를 보여준다. 지도에서 갈색 화살표는 GPS만 사용한 결과를, 보라색 화살표는 센서 융합 기반 결과를 보여준다.
좌측 영상에서 고가를 진입하기 전에 비교적 정확하던 GPS 기반 측위 결과가 중앙 영상에서 고가를 진입한 후에 오차가 커지다가 우측 영상에서는 지도 밖으로 나갈 정도로 오차가 매우 커지는 것을 확인할 수 있다.
하지만 센서 융합 기반 측위의 경우 고가 진입 전과 후에 모두 안정적인 결과를 보이며, 자차가 1차선에서 2차선으로 차선을 변경하는 것을 정확하게 추정하고 있음을 확인할 수 있다. 기준값을 출력하는 지도 생성 차량에 시제품을 장착하여 GPS 수신이 원활하지 않은 지역을 위주로 약 200km를 주행한 결과 차로 구별이 가능한 수준인 약 1m의 오차를 확보할 수 있음을 확인했다.
이는 1차년도 결과이며 2차년도에는 더욱 향상된 결과를 얻을 수 있을 것으로 예상하고 있다. 자세한 설명과 동영상은 주관 기관인 위드로봇 홈페이지에서 확인할 수 있다[5].
맺음말
자율 주행 및 첨단 운전자 보조 시스템을 위해서는 정밀 측위가 반드시 필요하며, 도심 상황에서 이를 달성하기 위해서는 전파항법 및 관성항법 기술과 더불어 정밀 지도와 환경 인식 센서를 융합하는 기술을 함께 사용해야 한다.
측위 및 지도 정보는 객체 인식, 차량 제어, 연비 향상 등의 다양한 용도로 사용할 수 있으며, 측위, 인식, 제어 등을 위한 다양한 정보가 포함된 통합 주행 환경 지도를 도입하면 자율주행 기술의 복잡도를 정해진 경로만을 운행하는 트램과 유사한 수준으로 감소시킬 수 있을 것으로 예상된다.
서재규 한양대학교 자동차전자제어연구소 연구조교수
정호기 한양대학교 미래자동차공학과 조교수
정리 : 임근난 기자 (fa@hellot.net)







































